Стрелочки на временных диаграммах асинхронных шин (а иногда и синхронных шин) показывают причину и следствие какого-либо действия (см. рис. 3.36). Установка сигнала МБУЫ приводит к включению информационных линий, а также к установке сигнала Б БУК Установка сигнала ББУЫ, в свою очередь, вызывает отключение адресных линий, а также линий MR.EC), КБ и МБУК Наконец, сброс сигнала МБУЫ вызывает сброс сигнала Б БУМ, и на этом процесс считывания заканчивается.
Набор таких взаимообусловленных сигналов называется полным квитированием. Здесь, в сущности, наблюдается 4 события:
1. Установка сигнала МЗУЫ.
2. Установка сигнала ЗБУЫ в ответ на сигнал МЗУЫ.
3. Сброс сигнала МБУЫ в ответ на сигнал Б БУК
4. Сброс сигнала Б БУМ в ответ на сброс сигнала МБУК
Следует уяснить, что взаимообусловленность сигналов не является синхронной. Каждое событие вызывается предыдущим событием, а не импульсами генератора. Если какая-то пара устройств (задающее и подчиненное) работает медленно, это никак не влияет на другую пару устройств, которая может работать гораздо быстрее.
Преимущества асинхронной шины очевидны, хотя на самом деле большинство шин являются синхронными. Дело в том, что синхронную систему построить проще, чем асинхронную. Центральный процессор просто выдает сигналы, а память просто реагирует на них. Здесь нет никакой причинно-следственной связи, а если компоненты выбраны удачно, все работает и без квитирования. Кроме того, в разработку синхронных шин очень много вложено.
Арбитраж шины
До этого момента мы неявно предполагали, что существует только одно задающее устройство шины — центральный процессор. В действительности микросхемы ввода-вывода могут становиться задающими устройствами при считывании информации из памяти и записи информации в память. Кроме того, они могут вызывать прерывания. Сопроцессоры также могут становиться задающими устройствами шины. Возникает вопрос: «Что происходит, когда задающим устройством шины становятся два или более устройства одновременно?» Чтобы предотвратить хаос, который может при этом возникнуть, нужен специальный механизм, называемый арбитражем шины.
Арбитраж может быть централизованным или децентрализованным. Рассмотрим сначала централизованный арбитраж. Простой пример централизованного арбитража показан на рис. 3.37, а. В данном примере один арбитр шины определяет, чья очередь следующая. Часто механизм арбитража встраивается в микросхему процессора, но иногда используется отдельная микросхема. Шина содержит одну линию запроса (монтажное ИЛИ), которая может запускаться одним или несколькими устройствами в любое время. Арбитр не может определить, сколько устройств запрашивают шину. Он может определить только факт наличия или отсутствия запросов.
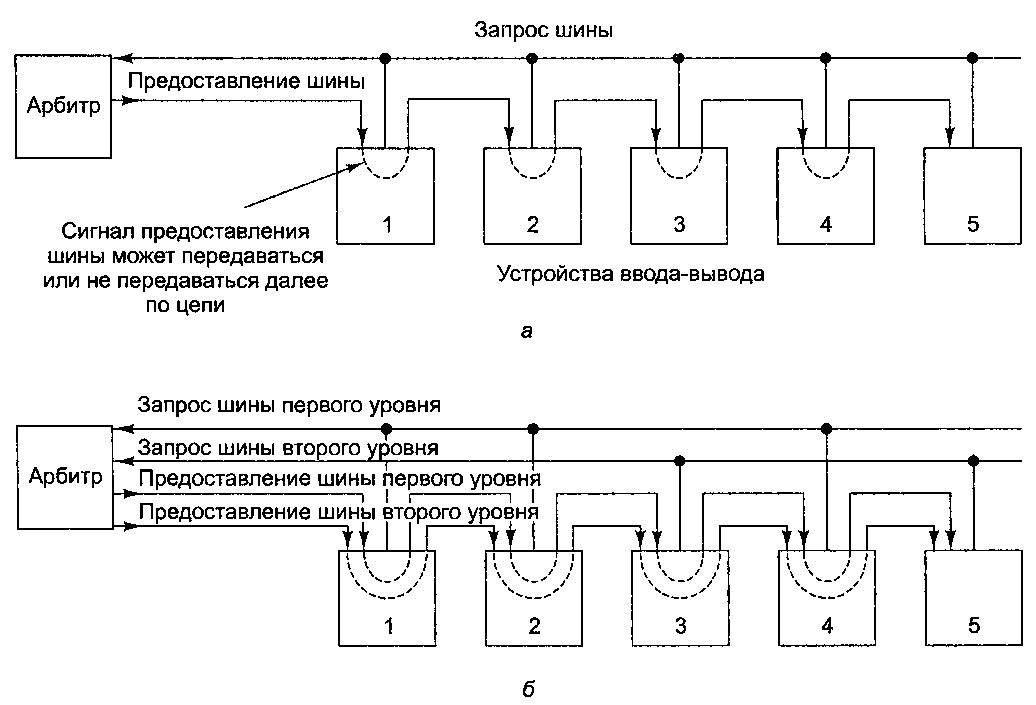
Рис. 3.37. Одноуровневый централизованный арбитраж шины с последовательным опросом (а); двухуровневый централизованный арбитраж (б)
Когда арбитр обнаруживает запрос шины, он устанавливает линию предоставления шины. Эта линия последовательно связывает все устройства ввода-вы вода (как в елочной гирлянде). Когда физически ближайшее к арбитру устройство получает сигнал предоставления шины, это устройство проверяет, нет ли запроса шины. Если запрос есть, устройство пользуется шиной, но не распространяет сигнал предоставления дальше по линии. Если запроса нет, устройство передает сигнал предоставления шины следующему устройству. Это устройство тоже проверяет, есть ли запрос, и действует соответствующим образом в зависимости от наличия или отсутствия запроса. Передача сигнала предоставления шины продолжается до тех пор, пока какое-нибудь устройство не воспользуется предоставленной шиной. Такая система называется системой последовательного опроса. При этом приоритеты устройств зависят от того, насколько близко они находятся к арбитру. Ближайшее к арбитру устройство обладает наивысшим приоритетом.