Унифицированная форма км 6: Унифицированная форма N КМ-6 / КонсультантПлюс
Справка-отчёт КМ-6 (бланк и образец). Как правильно заполнить справку по форме КМ-6
Заполните бланк без ошибок за 1 минуту!
Бесплатная программа для автоматического заполнения всех документов для торговли и склада.
- Счета на оплату
- Счета-фактуры
- Накладные
- Путевые листы
- Доверенности
- Акты выполненных работ
- Акты приемки, инвентаризации
- Коммерческие предложения
- Кассовые ордеры
Класс365 – быстрое и удобное заполнение всех первичных документов
Справку-отчёт кассира-операциониста по форме № КМ-6 применяют для составления отчёта о показаниях счётчика одной контрольно-кассовой машины (ККМ) и выручке за рабочую смену.
Унифицированная форма № КМ-6 утверждена постановлением Госкомстата России от 25.12.1998 г. № 132.
Как упростить работу с документами и вести учет легко и непринужденно
«Класс365» — онлайн программа для всех:
- 50 актуальных бланков документов
- Торговый и Складской учёт
- CRM-система для работы с клиентами
- Банк и Касса
- Интеграция с интернет-магазинами
- Встроенная почта и отправка SMS
Бесплатно для одного пользователя
Как правильно заполнить справку-отчёт
Справка-отчёт составляется ежедневно в одном экземпляре кассиром-операционистом, который ставит на ней свою подпись и вместе с выручкой сдаёт старшему кассиру или руководителю. Если в организации одна или две кассы, то кассир может сдавать выручку непосредственно инкассаторам банка. О сдаче денежных средств в банк делается отметка в справке-отчёте.
Если в организации одна или две кассы, то кассир может сдавать выручку непосредственно инкассаторам банка. О сдаче денежных средств в банк делается отметка в справке-отчёте.
Обратите внимание! Если организация использует современные кассовые аппараты (начиная с 2004 года), то графа 4 в табличной части справки не заполняется.
Справка-отчет подписывается кассиром-операционистом, старшим кассиром и руководителем организации. На основе данных из справки-отчета составляют сводный отчета «Сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации» (форма № КМ-7).
Как автоматизировать работу с документами и не заполнять бланки вручную
Автоматическое заполнение бланков документов. Сэкономьте свое время. Избавьтесь от ошибок.
Подключитесь к КЛАСС365 и пользуйтесь полным спектром возможностей:
- Автоматически заполнять актуальные типовые формы документов
- Печатать документы с изображением подписи и печати
- Создавать фирменные бланки с вашим логотипом и реквизитами
- Составлять лучшие коммерческие предложения (в том числе по собственным шаблонам)
- Выгружать документы в форматах Excel, PDF, CSV
- Рассылать документы по email прямо из системы
С КЛАСС365 вы сможете не только автоматически готовить документы.
Образец заполнения отчета кассира-операциониста по форме КМ-6 в 2021 году
Справка-отчет кассира-операциониста (форма КМ-6)— это документ, в котором отражается результат работы на ККТ с ЭКЛЗ за смену. На основании бланка оформляют приход наличной выручки.
Кто и зачем использует
КМ-6 составляют при работе с кассовой наличностью. Отчетность формируется в конце рабочего дня, его делают по каждой операционной кассе: документ позволяет оприходовать выручку за смену. Это ежедневный регистр, отчет по кассе за месяц по форме КМ-6 не составляется.
КМ-6 отражает сведения о показаниях денежных счетчиков, то есть данные о выручке за день. Информация о наличных к возврату по актам из формы КМ-3 в отчетности не показывается.
Как заполнять
Это унифицированная форма, утверждена Постановлением Госкомстата №132 от 25.12.1998. Организации используют этот бланк или разрабатывают собственный регистр.
Отчетность операциониста составляют ежедневно — в конце рабочего дня или смены, в одном экземпляре. Если выручка сдается в банк, проставьте отметку в КМ-6 и передайте регистр вместе с деньгами. Если наличность остается в организации, оформите приходный кассовый ордер на отчетную сумму.
Инструкция, как заполнять справку-отчет кассира-операциониста за смену:
- Указать название компании, адрес и телефон. В поле кодовых строк внести ИНН.
- Написать название модели и номер ККТ. Прикладную программу внести, только если она используется.
- Отметить операциониста.
- Заполнить поле «Смена» по номеру Z-отчета.
- В столбце 5 таблицы указать сумму на начало и на конец рабочей смены.

- В столбец 6 внести сведения из строки ГРОСС-ИТОГ Z-отчета.
- В 7 графе отразить сменный итог Z-отчетности. Если в течение смены проводились возвраты, их вычитают из сменного итога.
- В графе 8 поставьте прочерк, если возвраты не производились. Если покупатели делали возвраты, они отражаются в этой графе.
- Указать фамилию кассира и поставить подпись под каждой отчетной записью.
Результирующие сведения в поле «Итого» заполняются из столбцов 7 и 8 таблицы. Заполненный документ подписывает кассир, старший кассир и руководитель.
Образец
Вот так выглядит отчет кассира за смену в 2020 году:
Как внести исправления
В 54-ФЗ указано, как составить отчет кассира за операционный день — заполнить все строки по результатам фактических операций. Если допустили ошибку, коррективы вносятся так: неверное значение аккуратно зачеркивается, сверху пишется правильный показатель. Исправление заверяется подписью исполнителя, указывается дата коррективов (ст.
Что делать дальше
Ежедневный отчет по кассе за операционный день — это документальное основание для сведения показателей в форме КМ-7 по всем вырученным средствам организации.
Операционист заполняет справку и передает ее бухгалтеру для заполнения других результирующих регистров. Если деньги сдают в банк, КМ-6 отдают вместе с наличностью.
Можно ли не составлять
С 1 июля 2017 года ввели онлайн-кассы. Операционный отчет КМ-6 при онлайн-кассах не составляют. Все необходимые сведения формируются в онлайн-кассе, в соответствии с информацией о выручке за смену (Письмо Минфина №03-01-15/37692).
Организация самостоятельно решает, составлять ей КМ-6 или нет. Законодательство не обязывает заполнять эту отчетность. В 2020 году все сведения за операционный день передаются в налоговую и распечатываются для внутреннего подотчета из онлайн-кассы.
Отчет кассира по форме КМ-6
Отчет кассира-операциониста по форме КМ-6 оформляется ежедневно в единственном экземпляре.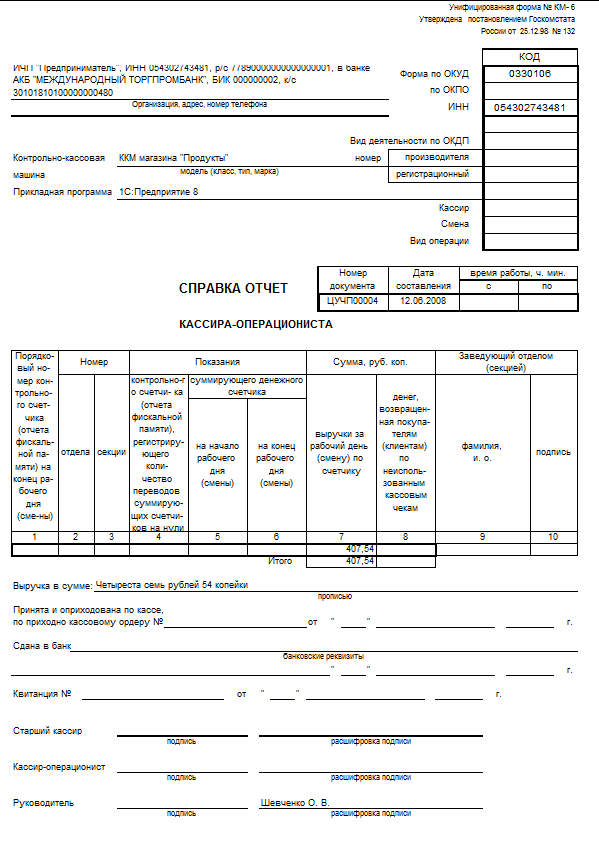 Что указывается в этом документе, для чего он нужен и куда его далее сдавать, расскажем в этой статье.
Что указывается в этом документе, для чего он нужен и куда его далее сдавать, расскажем в этой статье.
Функции справки-отчета
Форма КМ-6 (справка-отчет кассира-операциониста) – это типовой отчетный документ, который включает в себя ежедневный суммарный доход. Также в нем учитываются сведения счетчиков контрольно-кассовой техники организации. Сотрудник после заполнения этой формы ставит в документе свою личную подпись. Сдается справка-отчет вместе с ежедневным вырученным доходом старшему кассиру предприятия или собственнику. Далее кассир сдает отчет и выручку инкассатору банка. Ставится отметка в бланк отчета о сдаче вырученных денег в банк.
Отчет формы КМ-6 является главным отчетным документом кассира-операциониста, который подтверждает факт ежедневной выручки организации, подписывается старшим кассиром и сдается руководителю вместе с выручкой. Если выручку передали инкассаторам банка, необходимо пометить это в справке-отчете в соответствующей главе.
Основная функция справки-отчета в том, что она подтверждает прозрачность выручки организации в процессе проверок налоговых органов.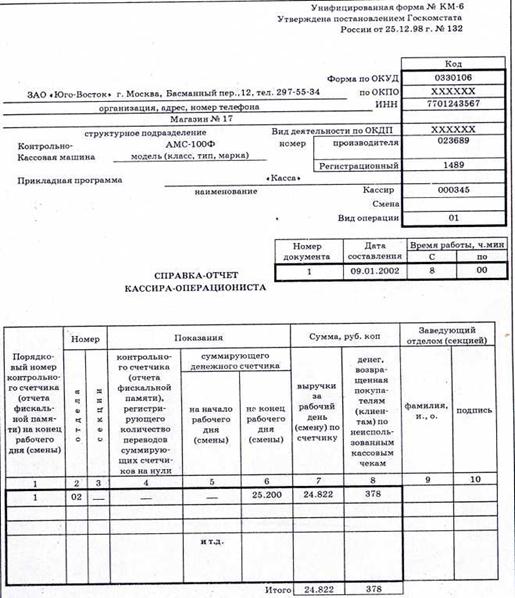 Также сведения отчета-справки кассира по форме КМ-6 учитываются при заполнении сводного отчета, который включает в себя всю информацию о доходе предприятия и его финансовом состоянии.
Также сведения отчета-справки кассира по форме КМ-6 учитываются при заполнении сводного отчета, который включает в себя всю информацию о доходе предприятия и его финансовом состоянии.
Сведения отчета-справки кассира по форме КМ-6 учитываются при заполнении сводного отчета.
Процесс заполнения справки-отчета
- В первой строке «организация и контакты компании» указываются юридическое наименование предприятия и адрес, юридически зарегистрированный в налоговой службе, а также телефоны организации.
- Во втором пункте указывается ИНН организации.
- В третьем пункте следует указать полную модель кассы либо перечислить все модели касс, если они разные.
- В четвертом пункте «Номер-производителя» кассир должен прописать заводской номер кассового аппарата.
- В пятой строке указывается Ф.И.О. кассира-операциониста.
- В шестой графе надо написать № текущего отчета (желательно, чтобы он совпадал с номером Z-отчета). В общую таблицу справки надо написать № Z-отчета в первую графу.
- Далее в графу № 2 «Отдел» надо вписать соответственно № отдела.
- В графу № 5 общей таблицы впишите сумму денежных средств на начало рабочего дня или из графы «ГРОСС-ИТОГ» начального Х-отчета.
- Пункт № 6 общего отчета заполнить суммой в соответствии со строкой «ГРОСС-ИТОГ» Z-отчета.
- Пункт № 7 заполняем суммой из строки «Сменный Итог Z-отчета».
- Строку № 8 заполняем суммой из строки «Возвраты» (если они были; если не были, тогда строку оставляем пустой).
- В графе № 9 общей таблицы надо написать Ф.И.О. кассира.
- Далее в пункте № 9 кассир-операционист ставит свою подпись.
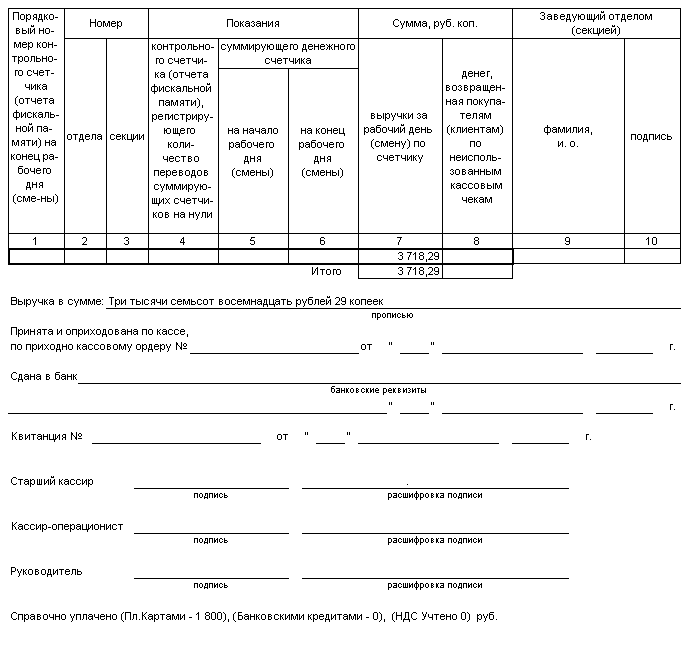
- И в пункте «Итого» указываем сумму из строк № 7 и № 8.
- Если в бланке остаются пустые графы, их необходимо перечеркнуть.
- В графе «Итого выручка» указываем сумму дневной и за смену выручки прописью.
- Графа «Сдана в банк» заполняется реквизитами банка.
- Далее подписанная старшим кассиром и руководителем организации справка-отчет передается бухгалтеру предприятия, инкассатору банка либо в кассу банка вместе с деньгами.
Образец заполнения отчета кассира-операциониста можно скачать здесь.
Автоматизация работы с документами
Есть вариант автозаполнения бланков отчетов, благодаря чему можно значительно сэкономить время кассиров и минимизировать ошибки. Для этого организации следует подключиться к специализированному сервису, и можно использовать такие функции:
- Автоматизация бухгалтерских документов.
- Распечатка документов с изображениями и мокрой печатью.
- Создание корпоративной документации организации.
- Выгрузка документации в распространенных офисных форматах.
- Рассылка документов по электронной почте прямо из сервиса.
Оформленный отчет подписывают кассир-операционист, старший кассир организации и собственник. На основе сведений из отчета составляют ежегодный/ежеквартальный сводный отчет по форме № КМ-7. Там прописываются сведения о данных счетчиков касс и выручке компании.
Отчет КМ-6 нужен для учета наличных денежных средств в кассе, безнала он не касается. Отчет по нему отправляется в налоговую автоматически, с учетом использования современных кассовых аппаратов. Постепенный перевод торговой сферы на безналичную оплату со временем может привести к полному отказу от необходимости составлять такие отчеты.
Отчет по нему отправляется в налоговую автоматически, с учетом использования современных кассовых аппаратов. Постепенный перевод торговой сферы на безналичную оплату со временем может привести к полному отказу от необходимости составлять такие отчеты.
Форма КМ-6. Справка-отчёт кассира-операциониста. Обязательно ли заполнять
Применение кассы в своей деятельности дело довольно хлопотное. С вводом в действие онлайн касс ситуация упростилась, однако, все отчеты, которые кассир должен был составлять ранее не отменены. Их составляют теперь в добровольном порядке. Одним из таких «добровольных» документов, который теперь можно не составлять – отчет по форме КМ-6. Рассмотрим его подробнее.
Что из себя представляет справка по форме КМ-6
Работа кассира трудна и ответственна. В своей работе эти специалисты руководствуются законом №54-ФЗ и Указаниями ЦБ РФ №3210-У от 11.03.2014 года. Кассиры сталкиваются с многочисленными отчетами, которые показывают движения в кассе.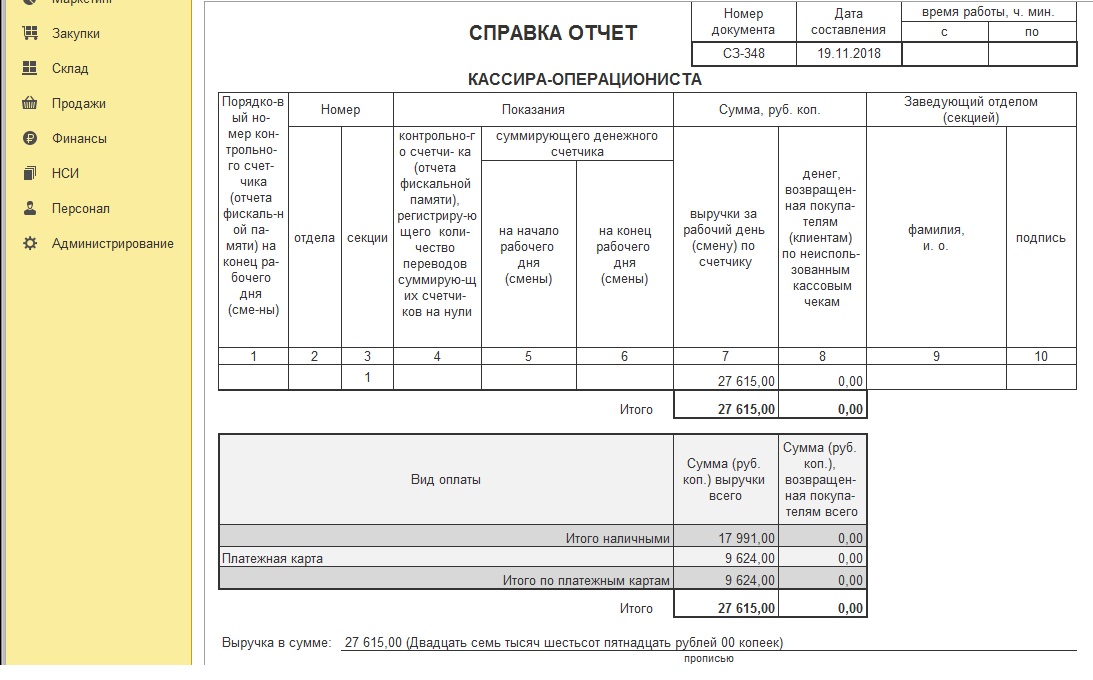 Каждый кассир сталкивается или сталкивался с составлением формы КМ-6. Это важный документ для кассира, его отчет о проведенных по кассе суммах.
Каждый кассир сталкивается или сталкивался с составлением формы КМ-6. Это важный документ для кассира, его отчет о проведенных по кассе суммах.
Изначально отчет составлялся только по наличной выручке, но с развитием технологий и появлением расчетов с помощью банковских карт, такая информация тоже стала отображаться в справке-отчете.
Форма справки – отчета утверждена Постановлением Госкомстата №132 от 25.12.1998 года. При этом компания может использовать в своей работе как унифицированную форму, так и форму отчета, разработанную на предприятии. Эта возможность закреплена в Письме ФНС РФ №ЕД-4-20/18059@ от 26.09.2016 года. Стоит, однако, учитывать, что разработанная на предприятии форма отчета должна обязательно содержать ключевые реквизиты унифицированного документа.
Мнение эксперта
Исходя из того, что законодательство, регулирующие вопросы применения кассовых аппаратов, состоит из закона №54-ФЗ и нормативных актов. Постановление Госкомстата №132 не входит в состав таких нормативных актов, поэтому применять унифицированную форму отчетаКМ-6 не обязательно.
Заместитель директора Департамента,
В.А. Прокаев
Справка составляется каждый день, в нее вносится информация о полученной выручке за день. Если есть приходные и расходные документы, они прикладываются к справке и весь пакет документов передается старшему кассиру, а при отсутствии такой должности – бухгалтеру или директору предприятия.
Если дневная выручка сдается инкассатору или непосредственно в банк, то об этом делается отметка на справке.
При работе по безналу действуют те же основные принципы. Регулирование безналичных расчетов закреплено в редакции закона №290-ФЗ от 03.07.2016 года.
И еще один нюанс – если в течении дня никаких движений денег по кассе не было, то есть выручка отсутствует, то справка – отчет по форме КМ-6 не составляется.
На основании таких справок – отчетов налоговый орган контролирует полноту отражения данных по выручке в отчетности организации.
В связи с изменениями в законе 54-ФЗ и введением онлайн касс, в настоящее время форма КМ-6 является необязательной к заполнению. Эта позиция указана в Письме Минфина №03-01-15/37692 от 16.06.2017 года.
Эта позиция указана в Письме Минфина №03-01-15/37692 от 16.06.2017 года.
Общие требования к заполнению справки – отчета
Какая бы организация или предприниматель не формировали справку, есть общие для всех моменты.
- Отчет КМ-6 всегда составляется в 1 экземпляре. Это своего рода промежуточная форма для составления сводного отчета по кассе. Форма передается либо вышестоящему руководству, либо сдается в банк. На предприятии справку можно подшить к отчету кассира
- На первой строке указывается общая информация о компании: полное название, ИНН, номер контактного телефона
- Отчет содержит информацию о величине выручки на начало дня и на конец дня
- Обязательно отражаем сумму возвратов, если они были
- Все столбцы, которые остаются пустыми нужно перечеркнуть
- Справка – отчет обязательно подписывается старшим кассиром (или ответственным лицом) и руководителем организации
ВАЖНО! Столбец 4, где нужно указать показания контрольного счетчика, заполняется только при использовании совсем старых кассовых аппаратов, действующих до 2004 года. Обычно этот столбец не заполняется Обычно этот столбец не заполняется |
Стандартная справка – отчет состоит из трех разделов:
- Строчный раздел
- Табличный раздел
- Завершающий раздел
Рассмотрим каждый из разделов справки – расчета в отдельности.
Заполнение строчного раздела справки
Для удобства представления информации, отразим порядок заполнения данного раздела в таблице.
| Графа справки | Как заполняем |
| Организация | В этой графе необходимо записать наименование компании или предпринимателя. Название указывается полное. Кроме того, здесь же нужно прописать и номер телефона |
| ИНН | В этом поле указываем идентификационный номер организации или предпринимателя |
| Структурное подразделение | Далеко не во всех организациях выделяются такие подразделения. Однако если они есть, то нужно зафиксировать эту информацию в отчете, то есть указать структурное подразделение, где была получена выручка за день |
| Сведения о ККТ | В этой графе указываем какая именно модель кассы используется.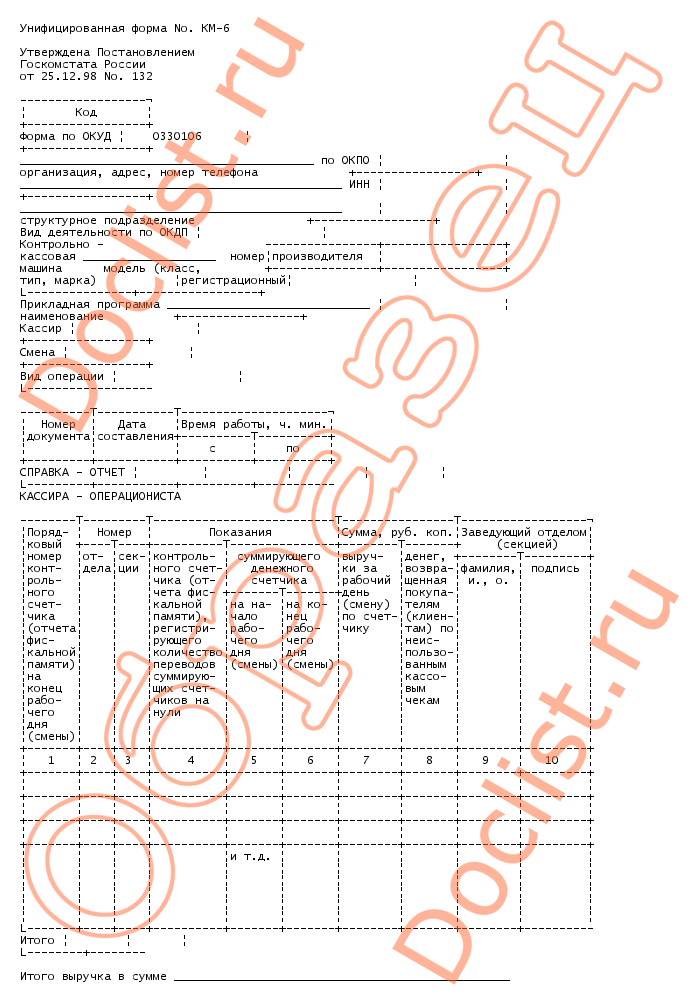 Такие сведения представлена как в документах к кассовому аппарату, так и в журнале кассира, на 1 странице Такие сведения представлена как в документах к кассовому аппарату, так и в журнале кассира, на 1 странице |
| Номер кассы | Такую информацию обычно предоставляет старший кассир (она записана на 1 странице журнала кассира). Если таким способом получить информацию не удается, то придется искать номер кассы в документах на нее |
| Прикладная программа | Прикладные программы не всегда используются с кассовыми аппаратами. Если при использовании кассового аппарата такие программы не используются, то графа не заполняется |
| Кассир | Эта графа не заполняется, если кассиров несколько. Если работает 1 человек, то необходимо записать его фамилию, имя и отчество |
| Смена | В данной графе указываем номер Z-отчета. Как правило, он начинается с буквы Z и записывается так: Z00012 |
| ВАЖНО! При составлении справки-отчета в обязательном порядке указываем порядковый ее номер, дату, время начала и окончания составления |
Заполнение табличного раздела справки
Приведем расшифровку по столбцам в таблице.
| Столбец справки | Как заполняем |
| Столбец 4 | Как уже было сказано выше, этот столбец заполняют довольно редко, только при использовании совсем старых кассовых аппаратов. Если применяемая в организации касса выпущена не раньше 2004 года, то данные не вносятся в графу |
| Столбец 5 | Здесь необходимо прописать величину наличных на начало смены. Эти данные можно взять из журнала кассира или в отчете, который был составлен с утра. Нас будет интересовать строка ГРОСС – ИТОГ |
| Столбец 6 | В этот столбец вносим данные из Z-отчета, по строке ГРОСС – ИТОГ |
| Столбец 7 | В данном столбце указывается итоговая сумма из Z-отчета с учетом проведенных возвратов |
| Столбец 8 | Заполняем при наличии возвратов (берем из Z-отчетов). Этот столбец не будем заполнять, если возвратов не было |
| Столбец 9 | В этом поле нужно указать ФИО кассира, который составляет отчет |
| Столбец 10 | Кассир – составитель отчета ставит свою подпись, тем самым удостоверяет, что изложенная в нем информация верна |
| Итоговая строка | В этой графе отражаем общую сумму, которая получилась по итогам столбцов 7 и 8 |
Заполнение завершающего раздела справки
Покажем заполнение третьей, завершающей части в таблице.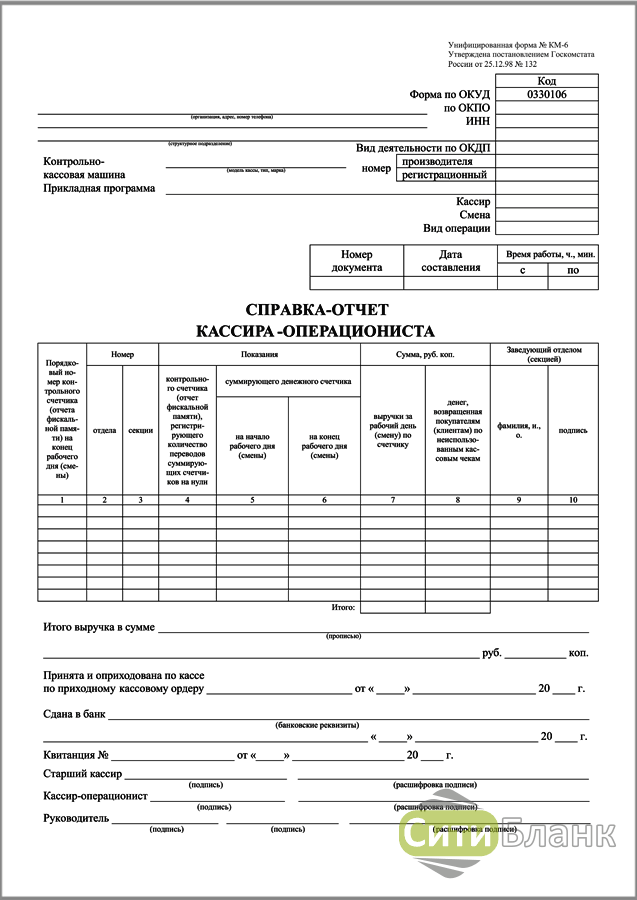
| Значение поля | Как заполняем |
| Общая величина выручки | Здесь отражаем какая сумма выручки получена за день. Величина показателя записывается словами |
| Сумма, которая принята и оприходована по кассе | Это поле частенько остается пустым, однако, если выписан приходный ордер, то заполнить ее придется. В жизни это бывает довольно редко |
| Сумма, которая сдана в банк | Как видно из названия строки, она заполняется только в случае сдачи выручки в банк или при передаче инкассатору. При этом в справку – расчет вносится информация о реквизитах банка, куда сдается выручка. В противном случае строка остается пустой |
| Номер квитанции | Строка с номером квитанции взаимно увязана со строкой о принятии суммы денег по кассе, поэтому в большинстве случаев тоже не заполняется |
После заполнения всех необходимых строк, прописываем кто является старшим кассиром, кассиром и руководителем компании.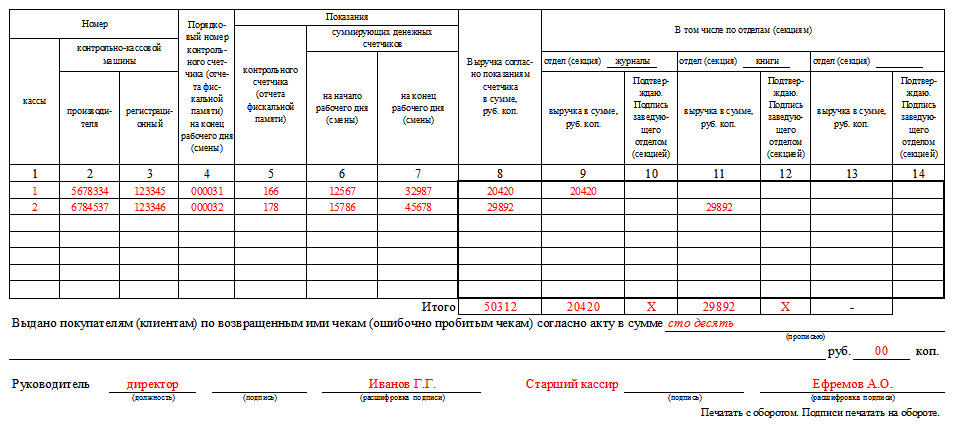 Этим лицам необходимо расписаться в отчете и указать расшифровку подписи.
Этим лицам необходимо расписаться в отчете и указать расшифровку подписи.
Форма отчета заполнена. Что дальше?
После составления документа кассир должен передать его старшему кассиру, а при отсутствии такой должности, бухгалтеру или руководителю организации.
Срок хранения такой справки в компании составляет 5 лет.
Индивидуальный предприниматель передает справку в банк.
Многие задаются вопросом: что будет, если справку не составить? А ничего не будет. Нет такой обязанности справку составлять, соответственно и ответственности нет. Однако во время проверки, налоговая обычно запрашивает такие отчеты, и его отсутствие будет считаться отрицательным моментом для компании.
Особенности применения справки по форме КМ-6
| Условия заполнения | Расшифровка |
| Кто заполняет справку | Поскольку составление данного отчета связано с материальной стороной деятельности компании, ее составлением должно заниматься материально – ответственное лицо. Кассир как раз и является таким лицом Кассир как раз и является таким лицом |
| Как происходит заполнение информации | Все данные вносятся в форму справки ручкой с синей или черной пастой |
| Допускаются ли помарки при заполнении формы | Поскольку данный документ является очень важным, затрагивает денежную сферу, заполнять его нужно разборчивым почерком, желательно без ошибок и помарок. Если контролирующие органы найдут исправления, то может быть наложен штраф |
| Период составления справки | Такие справки составляются каждый день |
| Кому передается отчет | Заполненная справка вместе с наличкой передается старшему кассиру, бухгалтеру или директору предприятия. Также она сдается в банк |
| Срок хранения справки | Справка – отчет должна храниться в компании в течение 5 лет |
Часто встречающиеся ошибки и вопросы по теме
Ошибка 1
Начинающий кассир составил отчет КМ-6 по итогу 2 дней.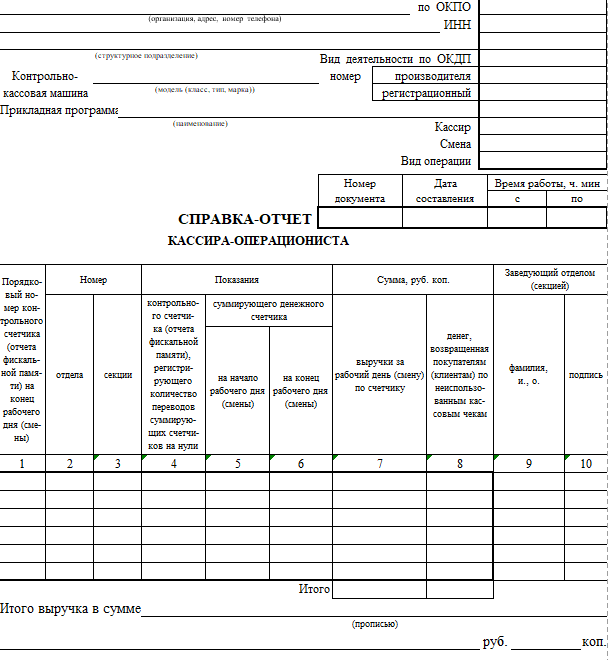 При сдаче документа в бухгалтерию такой отчет не был принят, поскольку справка-отчет по форме КМ-6 составляется ежедневно.
При сдаче документа в бухгалтерию такой отчет не был принят, поскольку справка-отчет по форме КМ-6 составляется ежедневно.
Ошибка 2
Если в организации 1 кассовый аппарат, а в течение дня заполняется несколько приходников, то при составлении отчета КМ-6 вписываются номера всех ПКО (например, 26-38). Сам отчет КМ-6 можно подшить к отчету кассира.
Нужно ли составлять справку по форме КМ-6 при применении онлайн касс?
С внедрением онлайн касс жизнь кассового работника стала проще, по крайней мере в плане составления отчетов.
Согласно Письму Минфина №03-01-15/34413 от 16.09.2016 года, в связи с введением нового вида касс становится необязательным составление многих форм, в частности и формы КМ-6.
Это означает, что данные формы не отменяются совсем, просто данные, содержащиеся в них, можно получить непосредственно из самой онлайн кассы. При необходимости все эти необязательные формы можно вести на предприятии, как и раньше.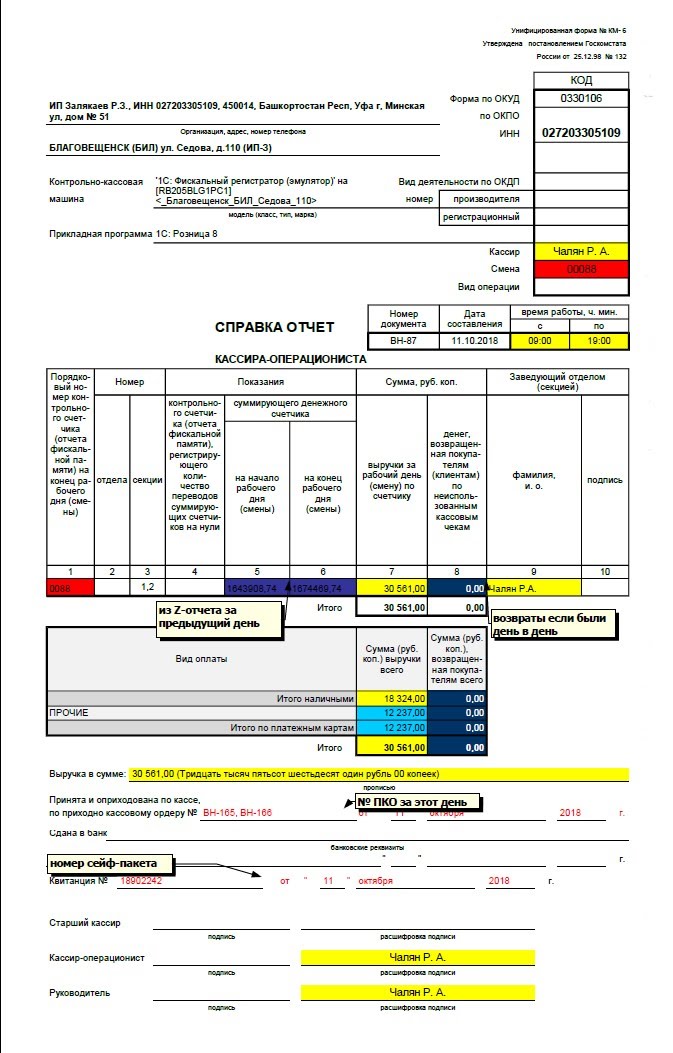 Это закреплено в Письме Минфина №01-03-15/37692 от 16.09.2017 года.
Это закреплено в Письме Минфина №01-03-15/37692 от 16.09.2017 года.
Как отразить суммы выручки по банковским картам в справке-отчете?
Если расчеты производятся наличными деньгами и по банковским картам, то при составлении отчета КМ-6 эти суммы должны показываться в разных строках. Таким образом, общая сумма по Z-отчету будет сходиться с формой КМ-6, а в строке, касающейся сдачи выручки в кассу, будет стоять только сумма наличных.
Кроме того, можно вовсе не отражать сумму по картам в отчете, поскольку приходник на эту сумму не составляется.
Какой из этих способов выбрать решает каждая организация для себя самостоятельно.
Способ отражения расчетов по банковским картам в отчете КМ-6, нужно обязательно прописать в учетной политике.
С введением онлайн касс жизнь кассира значительно упростилась. Справка КМ-6 являлась основным отчетом в деятельности организации или индивидуального предпринимателя, на основе которого учитывалась выручка. В современных условиях его можно не составлять. Однако налоговая инспекция проверяет приход выручки именно на основе такой справки. К ее составлению необходимо подойти со всей серьезностью. Каждая организация решает для себя самостоятельно заполнять такой отчет или нет, но он может помочь контролировать выручку компании.
В современных условиях его можно не составлять. Однако налоговая инспекция проверяет приход выручки именно на основе такой справки. К ее составлению необходимо подойти со всей серьезностью. Каждая организация решает для себя самостоятельно заполнять такой отчет или нет, но он может помочь контролировать выручку компании.
Справка отчет кассира операциониста форма км 6
Источник/официальный документ: Постановление Госкомстата РФ от 25.12.1998 №132
Штраф за несвоевременную сдачу: не предусмотрено
Название документа: Справка кассира-операциониста (форма КМ-6 по ОКУД 0330106)
Формат: .doc
Размер: 48128 кб
Скачать Печать Предварительный просмотр В закладки
Справка-отчет кассира-операциониста — это бланк, который заполняется ежедневно кассиром перед сдачей выручки за рабочий день. Бланк по форме КМ-6 заполняется в единственном экземпляре и вручается вместе с выторгом старшему кассиру или непосредственному руководителю.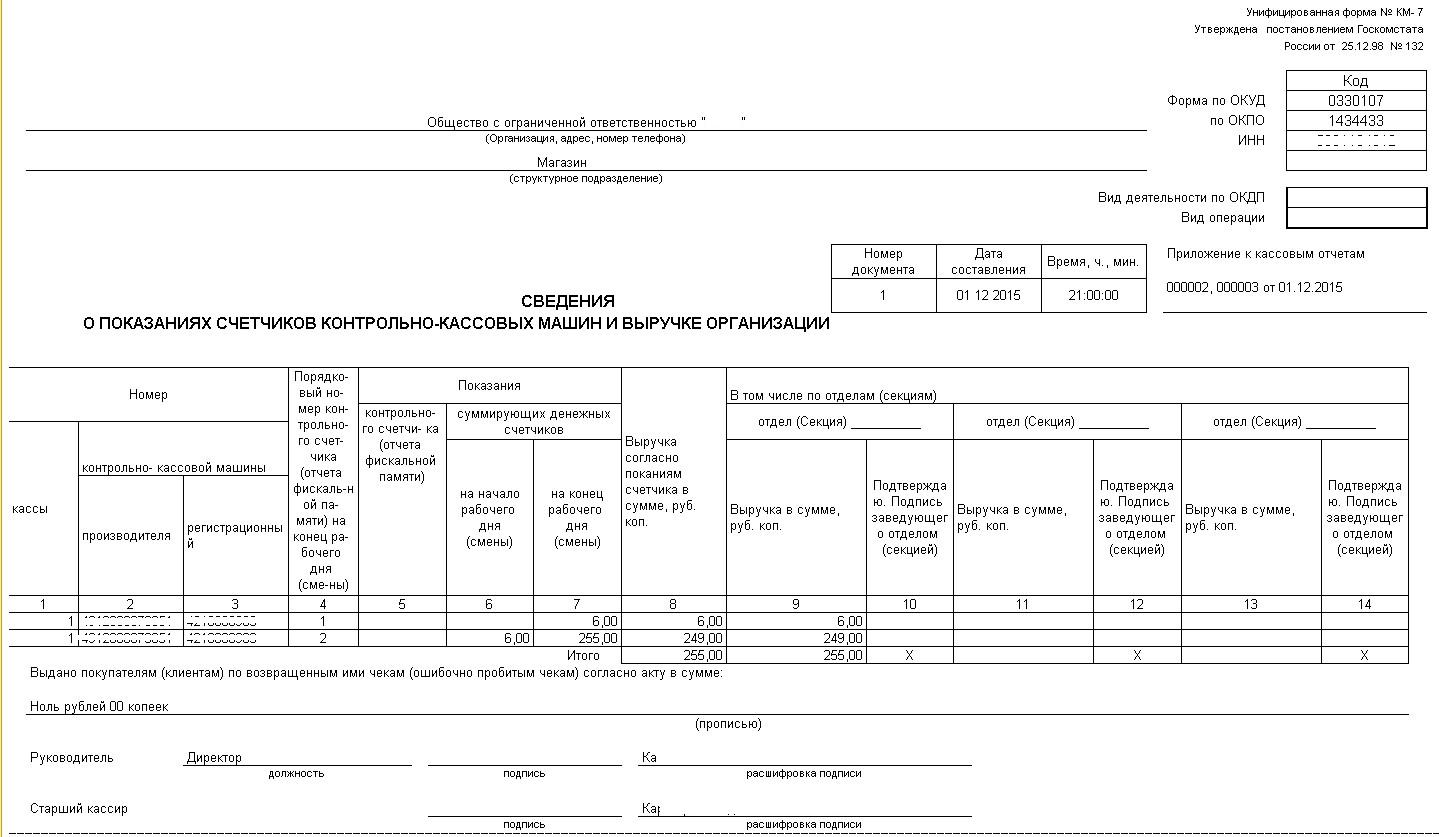
Форма КМ-6. Справка кассира-операциониста
В бланке указывается только информация об оплате наличными или банковской карточкой, безналичные платежи не учитываются.
Справка-отчет кассира-операциониста форма КМ-6 утверждена Постановлением Госкомстата РФ от 25.12.1998 №132. Обязательность её заполнения не регулируется нормативными документами и не контролируется проверяющими органами. Это внутренний подконтрольный документ организации, который понадобится для составления позже другого отчета «Сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации» (форма № КМ-7). В маленьких частных компаниях работники сразу отдают заполненный бланк сотрудникам банка. Если этого не происходит, начальство обязуется хранить справку 5 лет.
Применение отчета КМ-6 распространено не только в торговой сфере, а в любой фирме, где ведется бухгалтерский учет приходно-расходного баланса. Это значительно упрощает работу контролера при ежегодной сверке документов.
На сегодняшний день, данная справка носит характер рекомендованной Министерством финансов РФ формы для предприятий. Фирма может отказаться от заполнения бланка КМ-6, но обязуется предоставить альтернативный способ отчета кассирам-операционистам. Это необходимость, прописанная пунктом 6.1 Типовых правил эксплуатации ККМ, которая была утверждена Минфином 30.08.1993 №104.
Так как государством не предусмотрена административная или криминальная ответственность за отсутствие формы КМ-6, налоговая инспекция не может предъявить штраф предприятию. Но это не освобождает руководство и бухгалтерию от заполнения и предоставления контролирующим органам альтернативного отчета кассира. Таковым может служить кассовая книга со всеми необходимыми записями по приходу и расходу материальных средств. Также отсутствие заполненного кассиром-операционистом бланка КМ-6 отягощает участь владельца предприятия в суде, если его привлекут по статье 120 Налогового кодекса РФ или по статье 15.1 КоАП.
Образец заполнения справки-отчета кассира-операциониста (форма КМ-6)
Тут представлен образец, скачать бланк КМ-6 можно ниже по странице.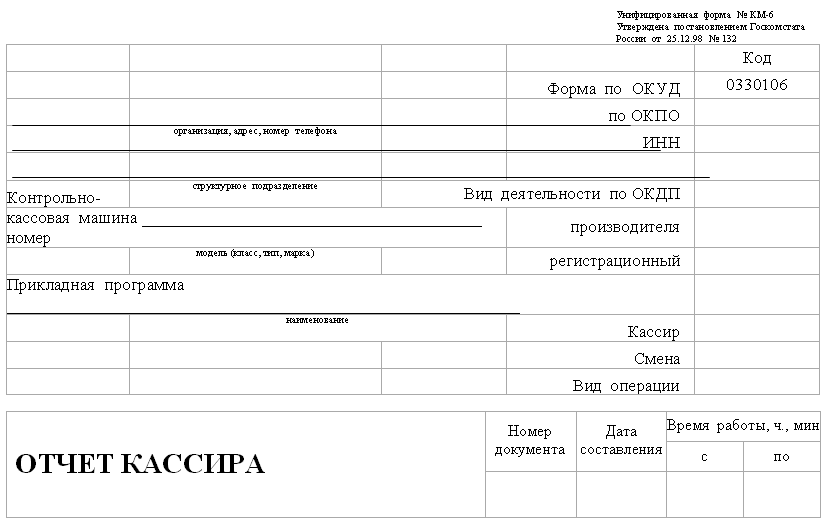
Предварительный просмотр
Полноэкранный предварительный просмотр
» Как правильно заполнять
Как правильно заполнять км 6
Как правильно заполнять КМ-6 при работе и с наличными деньгами и расчете по картам
Подскажите, как правильно заполнять КМ-6 при работе и с наличными деньгами и расчете по картам.
Ответ
Официальных разъяснений нет. Действующее законодательство не содержит специального порядка для заполнения формы КМ-6 при работе с наличными и при расчетах по картам. Следовательно, справка заполняется в общем порядке.
Справка-отчет кассира-операциониста применяется для составления отчета кассира-операциониста о показаниях счетчиков контрольно-кассовой машины и выручке за рабочий день (смену).
В первой строке отчета кассира необходимо указать название организации, ее адрес и номер телефона.
Обязательно указываются реквизиты ККМ. Далее нужно написать номер и дату составления документа, а также время работы.
В табличной части указываются показания счетчика на начало и на конец рабочего дня (смены). Выручка определяется по показанию счетчика на конец рабочего дня минус показания на начало дня и за вычетом суммы денег, возвращенных покупателям.
Затем кассиру организации необходимо написать сумму выручки за день прописью и поставить свою подпись.
Обоснование данной позиции приведено ниже в материалах Системы Главбух
1.ПОСТАНОВЛЕНИЕ ГОСКОМСТАТА РОССИИ от 25.12.1998 № 132
Унифицированные формы первичной учетной документации по учету денежных расчетов с населением при осуществлении торговых операций с применением контрольно-кассовых машин
Применяется для составления отчета кассира-операциониста о показаниях счетчиков контрольно-кассовой машины и выручке за рабочий день (смену ). Отчет составляет в одном экземпляре ежедневно кассир-операционист, подписывает его и вместе с выручкой сдает его по приходному ордеру старшему (главному) кассиру или руководителю организации.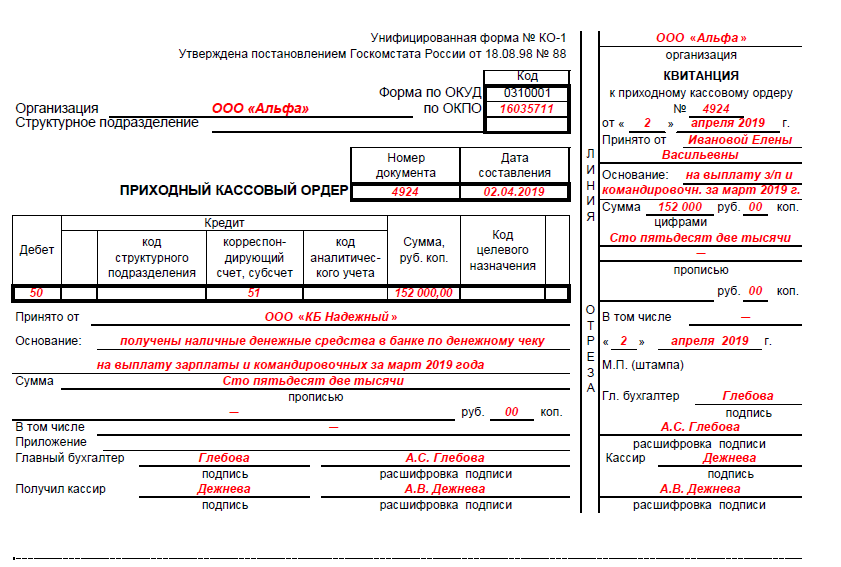 В небольших организациях с одной-двумя кассами кассир-операционист сдает деньги непосредственно инкассатору банка. Сдача денег в банк отражается в отчете. Выручка за рабочий день (смену) определяется по показаниям суммирующих денежных счетчиков на начало и конец рабочего дня (смены) за вычетом суммы денег, возвращенных покупателям (клиентам) по неиспользованным кассовым чекам и подтверждается соответствующими подписями заведующих отделами. В приеме и оприходовании денег по кассе в отчете подписываются старший кассир и руководитель организации. Отчет служит основанием для составления сводного отчета Сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации (форма N КМ-7 ).*
В небольших организациях с одной-двумя кассами кассир-операционист сдает деньги непосредственно инкассатору банка. Сдача денег в банк отражается в отчете. Выручка за рабочий день (смену) определяется по показаниям суммирующих денежных счетчиков на начало и конец рабочего дня (смены) за вычетом суммы денег, возвращенных покупателям (клиентам) по неиспользованным кассовым чекам и подтверждается соответствующими подписями заведующих отделами. В приеме и оприходовании денег по кассе в отчете подписываются старший кассир и руководитель организации. Отчет служит основанием для составления сводного отчета Сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации (форма N КМ-7 ).*
2. Статья:Особые правила, которых важно придерживаться при расчетах «пластиком»
В конце рабочего дня данные о безналичной выручке из Z-отчетов заносятся в журнал кассира-операциониста (форма № КМ-4 ) в таком порядке. В форма № КМ-4 нужно указать количество пластиковых карт, по которым производилась оплата, а в форма № КМ-4 – сумму выручки, которая была оплачена платежными картами. Информация из журнала кассира-операциониста о сумме выручки (как наличной, так и безналичной) переносится в форма № КМ- 6 (справка-отчет кассира-операциониста) и форма № КМ- 7 (сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации).*
Информация из журнала кассира-операциониста о сумме выручки (как наличной, так и безналичной) переносится в форма № КМ- 6 (справка-отчет кассира-операциониста) и форма № КМ- 7 (сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации).*
Данные о наличной выручке и о выручке, которую покупатели оплатили банквскими картами, в журнале кассира-операциониста нужно указывать отдельно.
Деньги за товары, которые клиенты приобрели с помощью пластиковых карт, в кассу не поступают.
Форма КМ-6 — справка-отчёт кассира (образец)
Поэтому на конец дня сумма наличных денег в кассовом ящике получается меньшей, чем общий итог выручки по данным Z-отчета. Разница равна сумме, оплаченной через ККТ в безналичном порядке.
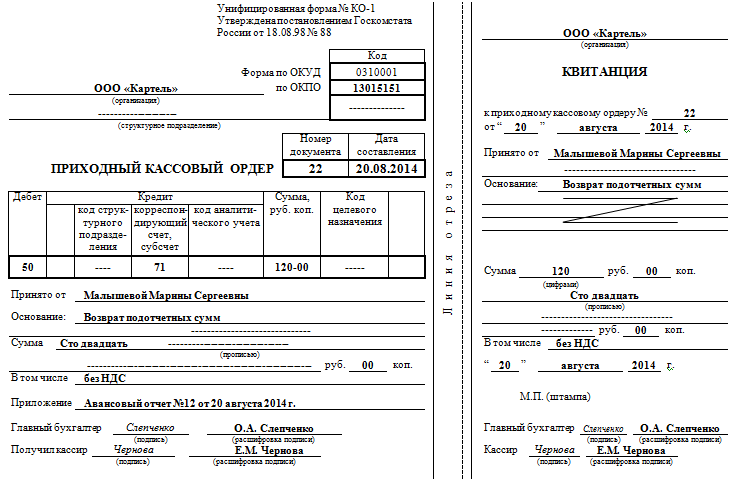
Обратите внимание: составить на основании Z-отчета приходный кассовый ордер (форма № КО-4 ) нужно только на сумму, которая принята в течение дня наличными. Эта же сумма должна быть отражена в кассовой книге (форма № КО-4 ). Выручка, поступившая по пластиковым картам, ни в приходный ордер, ни в кассовую книгу попасть не должна.
3. Статья:Справка-отчет кассира- операциониста
Если организация или предприниматель принимает от покупателей или заказчиков наличные деньги, нужно применять ККТ и заполнять все необходимые документы. Документов при работе с кассовой техникой требуется немало, но расскажем об одном из них – форме № КМ- 6. Почему-то по поводу его оформления у кассиров и бухгалтеров возникает множество вопросов.
На что обратить внимание в документе
Справка-отчет кассира-операциониста по форме № КМ-6, утвержденной форме № КМ- 6, заполняется в конце каждого рабочего дня при сдаче выручки в центральную кассу организации (или в банк – например, если выручку забирают инкассаторы).*
В первой строке формы указано «(организация, адрес, номер телефона)», однако справку-отчет кассира-операциониста заполняют в том же порядке и индивидуальные предприниматели, работающие с ККТ. То есть в первой строке они записывают свою фамилию, имя, отчество, адрес и номер телефона. *
*
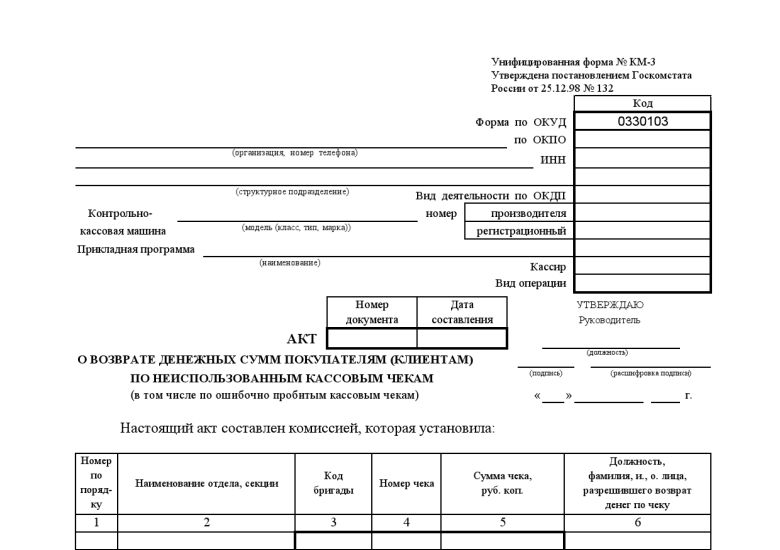
Если в течение рабочего дня деньги возвращались покупателям из операционной кассы, то сумма возврата отражается в форме № КМ-6. Соответственно сумма сданной выручки должна быть равна величине полученной выручки за минусом возврата. Напомним, что денежные средства возвращают покупателю из операционной кассы, только если он принес обратно товар, приобретенный в тот же день. При этом составляется акт по форме № КМ- 6, к которому прикладываются неиспользованные чеки. Если же покупатель возвращает товар, приобретенный в предшествующие дни, денежные средства ему выплачивают уже из центральной кассы организации или предпринимателя. В этом случае сумму возврата в форме № КМ-6, показывать не нужно. Сумму ошибочно пробитых чеков также отражают в форме № КМ- 6, подтверждая ее составлением акта по форме № КМ- 6.
Примечание. Форма имеет оборотную сторону, на которой указывается ФИО и ставятся подписи старшего кассира, кассира-операциониста, а также руководителя.
* Так выделена часть материала, которая поможет Вам принять правильное решение
Есть вопрос? Наши эксперты помогут за 24 часа! Получить ответ Новое
Как заполнять справку-отчет кассира-операциониста
Принимая наличные денежные средства, организации должны использовать контрольно-кассовую технику, а также оформлять необходимые документы. Одним из них является справка-отчет кассира-операциониста, которая имеет унифицированную форму № КМ-6. Рассмотрим порядок ее заполнения.
Одним из них является справка-отчет кассира-операциониста, которая имеет унифицированную форму № КМ-6. Рассмотрим порядок ее заполнения.
Для чего нужно
Справка-отчет кассира-операциониста является отчетным документом кассира о показаниях счетчиков ККМ и выручке за день (смену).
Как правило, проверяющие органы смотрят наличие такого документа в целях проверки полноты отражения выручки.
Форма
Имеет унифицированную форму № КМ-6, утвержденную постановлением Госкомстата России от 25 декабря 1998 г. № 132.
Ежедневно на конец рабочего дня кассир обязан в единственном экземпляре составить отчет и вместе с выручкой по приходному кассовому ордеру сдать в кассу организации или в банк.
Отчет необходимо хранить пять лет.
Правила заполнения
В первой строке отчета кассира необходимо указать название организации, ее адрес и номер телефона. При наличии структурного подразделения его также нужно указать.
Если данный документ заполняет индивидуальный предприниматель, он указывает в той же последовательности такую информацию.
Обязательно указываются реквизиты ККМ (название, регистрационный номер, а также номер производителя).
Далее нужно написать номер и дату составления документа, а также время работы.
В табличной части указываются показания счетчика на начало и на конец рабочего дня (смены). Выручка определяется по показанию счетчика на конец рабочего дня минус показания на начало дня и за вычетом суммы денег, возвращенных покупателям.
Затем кассиру организации необходимо написать сумму выручки за день прописью и поставить свою подпись.
Кассир вместе с выручкой сдает отчет по приходному ордеру старшему (главному) кассиру или руководителю организации. В небольших организациях с одной-двумя кассами кассир-операционист сдает деньги непосредственно инкассатору банка. Сдача денег в банк отражается в отчете.
Унифицированная форма № КM-6 — бланк и образец
Унифицированная форма КМ-6является одним из отчетов, заполняемых кассиром в конце каждого дня, когда производятся кассовые операции с наличными деньгами. Мы расскажем о том, как заполнить форму КМ-6, где можно скачать ее бланк и посмотреть образец заполнения.
Мы расскажем о том, как заполнить форму КМ-6, где можно скачать ее бланк и посмотреть образец заполнения.
Работаем с наличными деньгами
Работа с наличкой всегда сопряжена с большой ответственностью. Кассиру нужно уметь не только правильно оформить все кассовые документы, но и соблюсти при этом требования законодательства.
Важно!Основные моменты, которые должен знать кассир при работе с наличными деньгами, указаны в законе о применении ККТ от 22.05.03 № 54-ФЗ и указании ЦБ РФ о кассовых операциях от 11.03.14 № 3210-У.
Только это еще не всё: у кассира много и других обязанностей. Одна из них — заполнение отчета унифицированной формы КМ-6 Справка-отчет кассира-операциониста . Основное его назначение — представить информацию о показаниях счетчиков кассовой машины и выручке за рабочий день (или кассовую смену).
О порядке заполнения формы КМ-6 поговорим далее.
Заполняем форму КМ-6
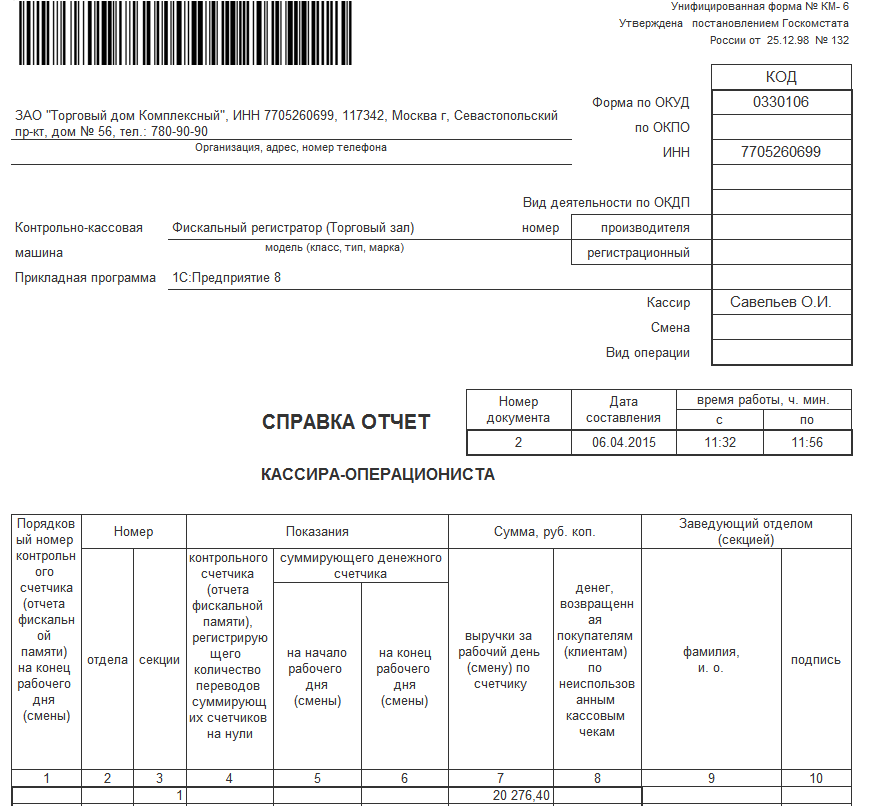
Отчет КМ-6 заполняется кассиром в 1 экземпляре. После отображения информации о компании (наименование и телефон, КПО, ИНН) и применяемой модели кассового аппарата (наименование, заводской и регистрационный номер) кассир должен отразить выручку за смену по данным суммирующих счетчиков на начало и конец рабочего дня.
После отображения информации о компании (наименование и телефон, КПО, ИНН) и применяемой модели кассового аппарата (наименование, заводской и регистрационный номер) кассир должен отразить выручку за смену по данным суммирующих счетчиков на начало и конец рабочего дня.
Кроме того, для заполнения формы КМ-6 требуется знать сумму наличных средств, возвращенных покупателям (при возврате товара), и по неправильно пробитым чекам, чтобы конечная сумма денежных средств по данным отчета отражала фактически полученную наличную выручку компании за смену. Подписать этот отчет должны старший кассир и руководитель компании.
Скачать бланк формы КМ-6 вы можете на нашем сайте:
На нашем сайте вы можете также ознакомиться с порядоком заполнения других унифицированных форм — см. материал Зарплатная ведомость формы Т 53 (скачать бланк) .
Заполнить форму КМ-6 вам поможет образец, который можно скачать на нашем сайте:
Итоги
Результат работы кассира за смену (кассовая выручка) оформляется с помощью унифицированной формы КМ-6. В этом отчете указываются данные суммирующих счетчиков кассового аппарата. Подписывают его руководитель и старший кассир.
В этом отчете указываются данные суммирующих счетчиков кассового аппарата. Подписывают его руководитель и старший кассир.
Комментариев пока нет!
Форма КМ-6 «Отчет кассира-операциониста»
Форма КМ-6 справка-отчет кассира-операциониста (бланк и образец)
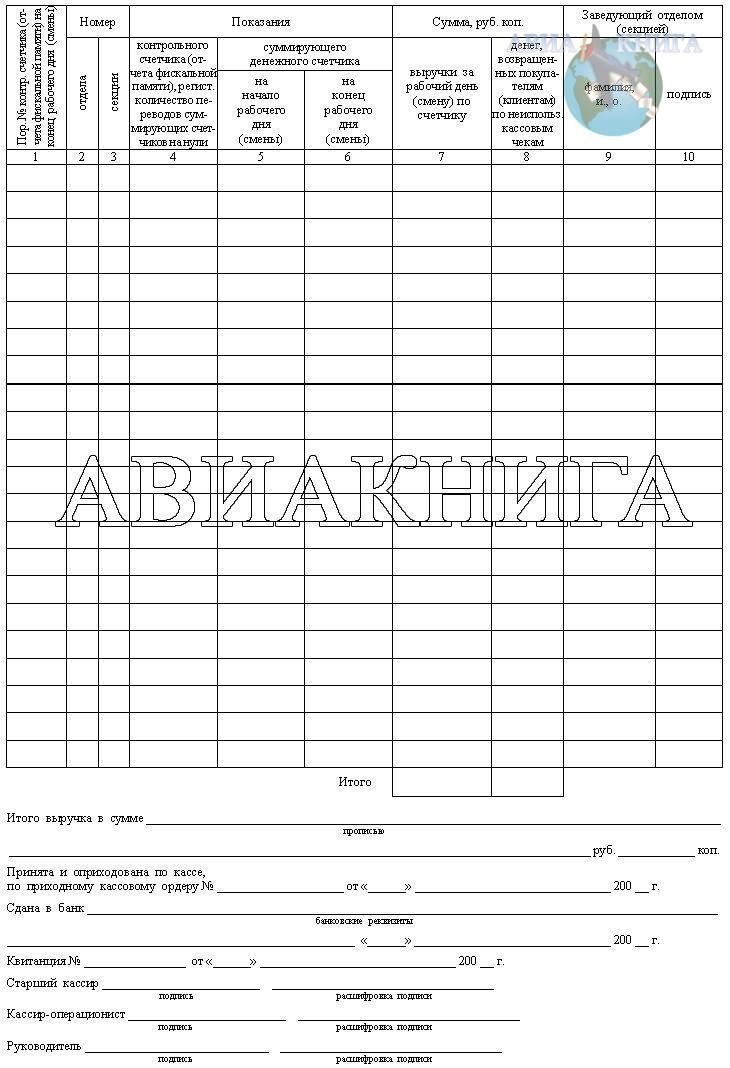
Форма КМ-7. Сведения о показаниях счетчиков контольно-кассовых машин и выручке организации
Кассир-операционист должен оформлять документ, которым сопровождается закрытие кассового аппарата после смены. Этот документ называется справка-отчет кассира. В документе имеется необходимая информация о данных счетчика, конкретные суммы, связанные с инкассацией, и любые другие данные, с помощью которых можно проследить движение наличности. Также в документе указывается дата закрытия смены. Если старший кассир использовал несколько ККМ, то необходимо приготовить сводный отчет, который будет содержать информацию из документа формы КМ-7. Сейчас мы рассмотрим с вами правила оформления этого документа. Вы можете скачать образец в конце этой статьи.
Вы можете скачать образец в конце этой статьи.
Бланк формы КМ-7 нужно заполнить в одном экземпляре. Его необходимо сдать в бухгалтерию до того, как начнется кассовый день, также как и другие отчеты, такие как приходные, возвратные акты и другие документы. Образец можно скачать здесь.
Форма КНД 1110021 заполняется в том случае, если возникает потребность в открытии, перерегистрации или снятии с учета ККТ.
Форма КМ-7 для кассовых операцийВ заполнении формы КМ-7 не должно возникать каких-либо сложностей, главное это внимательность. Чтобы у вас на руках имелись все необходимые данные, нужно знать информацию из отчетов операционистов. У каждого отчета имеется свой номер и дата. Нижеприведенные правила обязательно нужно учитывать при заполнении документа:
- Указывается имя организации, ИНН, адрес, а также местоположение подразделения, если таковое имеется.
- Необходимо указать дату, причем время указывается до минут.
- Порядковый номер, который указывается в соответствии со сквозной нумерацией.

- Необходимо дать информацию о номерах отчетов кассиров, вместе с датами. Также должна указываться объединенная форма.
- Указываются номера ККМ и другие отличительные признаки, которых может быть несколько. Все это указывается на обратной стороне.
- Должна иметься информация об отчетах контрольного счетчика, информация об отчете фискальной памяти, где нужно указать его номер. Все это заносится в соответствующие столбцы. Данные счетчик указываются как на начало дня, так и на конец.
- Суммарная выручка за смену, которую нужно разбить по отделам.
- Если имеется сумма, которая была возвращена в связи с какими-то обстоятельствами покупателям, это нужно зафиксировать в отдельной строке прописью.
- Все заверяется старшим кассиром, где необходимо расшифровать фамилию. Готовый бланк нужно приложить к отчету КМ-6.
Сейчас с помощью специальных программ для компьютера можно оформить всю необходимую информацию, связанную с показаниями счетчиков. У большинства организаций должен быть документ, который называется «справка-отчет кассира операциониста». Такой документ, скорее всего, обязательно будет, если торговая точка имеет зарегистрированный ККМ с фискальной памятью. Вся нужная информация берется из этого документа, именно на её основании можно составить нужный документ.
У большинства организаций должен быть документ, который называется «справка-отчет кассира операциониста». Такой документ, скорее всего, обязательно будет, если торговая точка имеет зарегистрированный ККМ с фискальной памятью. Вся нужная информация берется из этого документа, именно на её основании можно составить нужный документ.
Чтобы вы имели представление о том, как максимально правильно заполнить КМ-7, вы можете скачать документ по ссылке ниже.
Скачать образец и бланк формы КМ-7
Справка-отчёт кассира-операциониста
форма КМ-6, А4, 100шт/уп, офсет
упак
Справка-отчет кассира-операциониста (Форма КМ-6) соответствует Постановлению Госкомстата РФ от 25.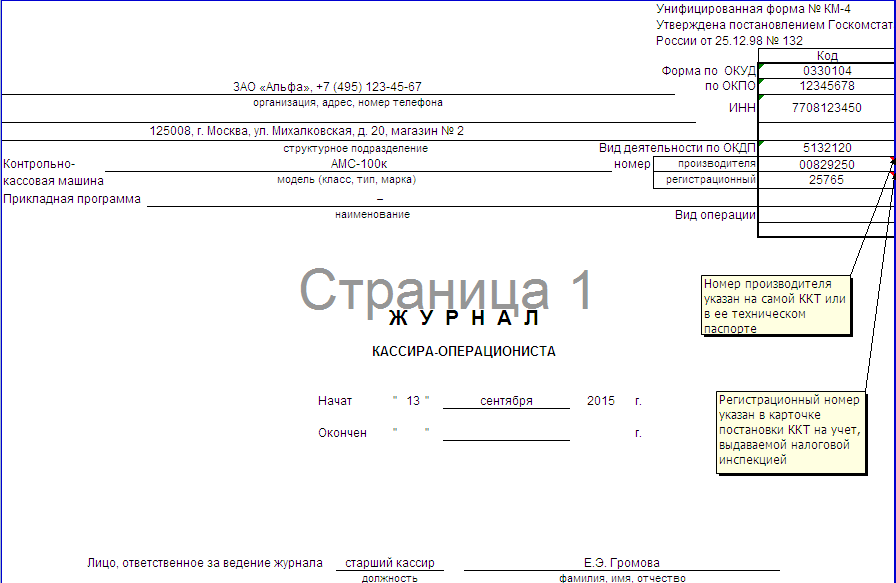 12.1998 № 132 «Об утверждении унифицированных форм первичной учетной документации по учету торговых операций»
Справка-отчет кассира-операциониста расположена на листе с оборотом формата А4.
Справка-отчет кассира-операциониста по форме КМ-6 применяется для составления отчета кассира-операциониста о показаниях счетчиков контрольно-кассовой машины и выручке за рабочий день (смену).
Код формы по ОКУД 0330106.
Отчет составляет в одном экземпляре ежедневно кассир-операционист, подписывает его и вместе с выручкой сдает его по приходному ордеру старшему (главному) кассиру или руководителю организации. В небольших организациях с одной — двумя кассами кассир-операционист сдает деньги непосредственно инкассатору банка. Сдача денег в банк отражается в отчете.
Выручка за рабочий день (смену) определяется по показаниям суммирующих денежных счетчиков на начало и конец рабочего дня (смены) за вычетом суммы денег, возвращенных покупателям (клиентам) по неиспользованным кассовым чекам, и подтверждается соответствующими подписями заведующих отделами.
12.1998 № 132 «Об утверждении унифицированных форм первичной учетной документации по учету торговых операций»
Справка-отчет кассира-операциониста расположена на листе с оборотом формата А4.
Справка-отчет кассира-операциониста по форме КМ-6 применяется для составления отчета кассира-операциониста о показаниях счетчиков контрольно-кассовой машины и выручке за рабочий день (смену).
Код формы по ОКУД 0330106.
Отчет составляет в одном экземпляре ежедневно кассир-операционист, подписывает его и вместе с выручкой сдает его по приходному ордеру старшему (главному) кассиру или руководителю организации. В небольших организациях с одной — двумя кассами кассир-операционист сдает деньги непосредственно инкассатору банка. Сдача денег в банк отражается в отчете.
Выручка за рабочий день (смену) определяется по показаниям суммирующих денежных счетчиков на начало и конец рабочего дня (смены) за вычетом суммы денег, возвращенных покупателям (клиентам) по неиспользованным кассовым чекам, и подтверждается соответствующими подписями заведующих отделами. В приеме и оприходовании денег по кассе в отчете подписываются старший кассир и руководитель организации.
Отчет служит основанием для составления сводного отчета «Сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации» (форма КМ-7).
В приеме и оприходовании денег по кассе в отчете подписываются старший кассир и руководитель организации.
Отчет служит основанием для составления сводного отчета «Сведения о показаниях счетчиков контрольно-кассовых машин и выручке организации» (форма КМ-7).
| Ценовой сегмент: | стандарт |
|---|---|
| Формат: | А4 |
| Распродажа: | нет |
| Ставка НДС: | 20.00 % |
Описание товара составлено на основании данных, предоставленных производителем.
Производитель оставляет за собой право без предварительного уведомления вносить изменения
в конструкцию, комплектацию или технологию изготовления изделия,
не ухудшающие его потребительских свойств, с целью улучшения его технических характеристик.![]()
UNC и UNF — унифицированная дюймовая резьба
- UNC — унифицированная национальная крупная резьба — сопоставима с метрической резьбой ISO
- UNF — унифицированная национальная мелкая резьба
- Внутренняя и наружная резьба UNC / UNF параллельны
- Угол фланца UNC / UNF составляет 60 °
Унифицированная резьба бывает трех разных классов:
- для приложений, где требуется большой допуск, чтобы обеспечить легкую сборку даже с небольшими зазубринами на резьбе
- наиболее часто используемый класс для общих приложений
- для применений, где важны близость посадки и / или точность элементов резьбы.
UNC — унифицированная крупная резьба
резьба UNC согласно ANSI B1.1:
| Главный диаметр (дюймы) | Резьбы на дюйм (tpi) | Главный диаметр | Размер сверла для метчика (мм) | Шаг (мм) | |
|---|---|---|---|---|---|
| (дюйм) | (мм) | ||||
| # 1-64 | 64 | 0,073 | 1,854 | 1,50 | 0,397 |
| # 2 — 56 | 56 | 0. 086 086 | 2,184 | 1,80 | 0,453 |
| # 3-48 | 48 | 0,099 | 2,515 | 2,10 | 0,529 |
| # 4-40 | 40 | 0,112 | 2,845 | 2,35 | 0,635 |
| # 5-40 | 40 | 0,125 | 3,175 | 2,65 | 0,635 |
| # 6-32 | 32 | 0.138 | 3,505 | 2,85 | 0,794 |
| # 8-32 | 32 | 0,164 | 4,166 | 3,50 | 0,794 |
| # 10-24 | 24 | 0,190 | 4,826 | 4,00 | 1,058 |
| # 12-24 | 24 | 0,216 | 5,486 | 4,65 | 1,058 |
| 1/4 «- 20 | 20 | 0.250 | 6,350 | 5,35 | 1,270 |
| 5/16 дюйма — 18 | 18 | 0,313 | 7,938 | 6,80 | 1,411 |
| 3/8 дюйма — 16 | 16 | 0,375 | 9,525 | 8,25 | 1,587 |
| 7/16 «- 14 | 14 | 0,438 | 11,112 | 9,65 | 1,814 |
| 1/2″ — 13 | 13 | 0. 500 500 | 12,700 | 11,15 | 1,954 |
| 9/16 «- 12 | 12 | 0,563 | 14,288 | 12,60 | 2,117 |
| 5/8″ — 11 | 11 | 0,625 | 15,875 | 14,05 | 2,309 |
| 3/4 дюйма — 10 | 10 | 0,750 | 19,050 | 17,00 | 2,540 |
| 7/8 дюйма — 9 | 9 | 0.875 | 22,225 | 20,00 | 2,822 |
| 1 «- 8 | 8 | 1.000 | 25,400 | 22,85 | 3,175 |
| 1 1/8″ — 7 | 7 | 1,125 | 28,575 | 25,65 | 3,628 |
| 1 1/4 дюйма — 7 | 7 | 1,250 | 31,750 | 28,85 | 3,628 |
| 1 3/8 дюйма — 6 | 6 | 1.375 | 34,925 | 31,55 | 4,233 |
| 1 1/2 дюйма — 6 | 6 | 1,500 | 38,100 | 34,70 | 4,233 |
| 1 3/4 дюйма — 5 | 5 | 1,750 | 44,450 | 40,40 | 5,080 |
| 2 «- 4 1/2 | 4 1/2 | 2.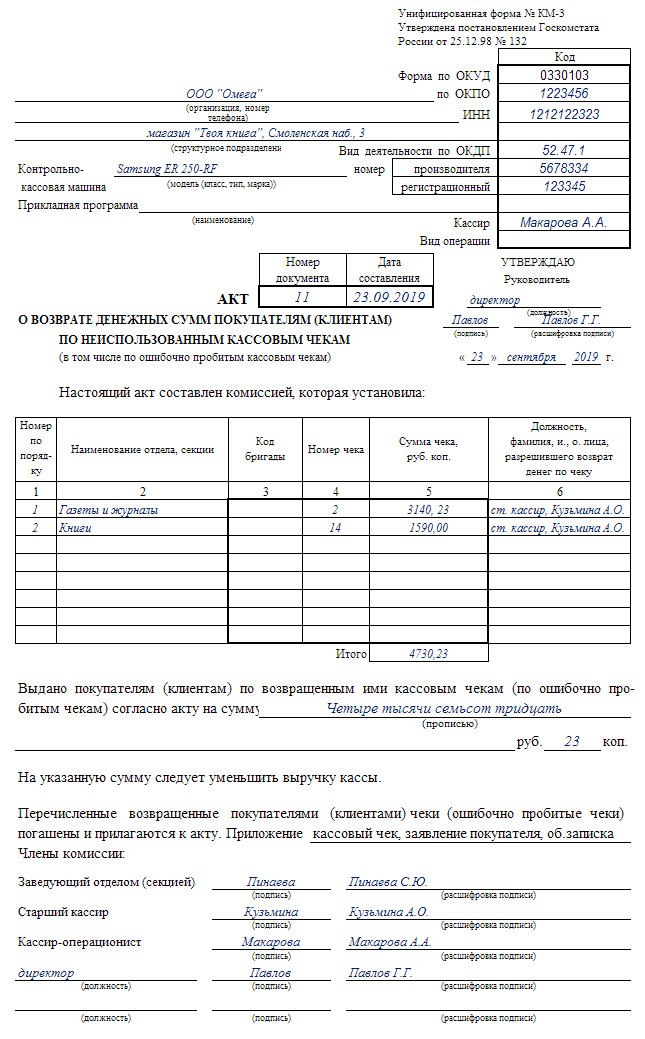 000 000 | 50,800 | 46,30 | 5,644 |
| 2 1/4″ — 4 1/2 | 4 1/2 | 2.250 | 57,150 | 52,65 | 5,644 |
| 2 1/2 дюйма — 4 | 4 | 2,500 | 63,500 | 58,50 | 6,350 |
| 2 3/4 дюйма — 4 | 4 | 2.750 | 69.850 | 64.75 | 6.350 |
| 3 «- 4 | 4 | 3.000 | 76.200 | 71.10 | 6.350 |
| 3 1/4″ — 4 | 4 | 3.250 | 82,550 | 77,45 | 6,350 |
| 3 1/2 «- 4 | 4 | 3.500 | 88.900 | 83,80 | 6.350 |
| 3 3/4″ — 4 | 4 | 3,750 | 95,250 | 90,15 | 6,350 |
| 4 дюйма — 4 | 4 | 4.000 | 101,600 | 96,50 | 6,350 |
Пример — Типовое обозначение резьбы UNC
UNF — Унифицированная национальная тонкая резьба
Резьба UNF ANSI B1. 1:
1:
| Главный диаметр (дюймы) | Резьбы на дюйм (tpi) | Главный диаметр | Размер сверла для метчика (мм) | Шаг (мм) | |
|---|---|---|---|---|---|
| (дюйм) | (мм) | ||||
| # 0-80 | 80 | 0,060 | 1,524 | 1,25 | 0,317 |
| # 1-72 | 72 | 0.073 | 1,854 | 1,55 | 0,353 |
| # 2 — 64 | 64 | 0,086 | 2,184 | 1,90 | 0,397 |
| # 3 — 56 | 56 | 0,099 | 2,515 | 2,15 | 0,453 |
| # 4-48 | 48 | 0,112 | 2,845 | 2,40 | 0,529 |
| # 5-44 | 44 | 0. 125 125 | 3,175 | 2,70 | 0,577 |
| # 6-40 | 40 | 0,138 | 3,505 | 2,95 | 0,635 |
| # 8-36 | 36 | 0,164 | 4,166 | 3,50 | 0,705 |
| # 10-32 | 32 | 0,190 | 4,826 | 4,10 | 0,794 |
| # 12-28 | 28 | 0.216 | 5,486 | 4,70 | 0,907 |
| 1/4 «- 28 | 28 | 0,250 | 6,350 | 5,50 | 0,907 |
| 5/16″ — 24 | 24 | 0,313 | 7,938 | 6,90 | 1,058 |
| 3/8 дюйма — 24 | 24 | 0,375 | 9,525 | 8,50 | 1,058 |
| 7/16 дюйма — 20 | 20 | 0.438 | 11.112 | 9.90 | 1.270 |
| 1/2 «- 20 | 20 | 0. 500 500 | 12.700 | 11.50 | 1.270 |
| 9/16″ — 18 | 18 | 0,563 | 14,288 | 12,90 | 1,411 |
| 5/8 дюйма — 18 | 18 | 0,625 | 15,875 | 14,50 | 1,411 |
| 3/4 дюйма — 16 | 16 | 0.750 | 19,050 | 17,50 | 1,587 |
| 7/8 «- 14 | 14 | 0,875 | 22,225 | 20,40 | 1,814 |
| 1″ — 12 | 12 | 1.000 | 25,400 | 23,25 | 2,117 |
| 1 1/8 «- 12 | 12 | 1,125 | 28,575 | 26,50 | 2,117 |
| 1 1/4″ — 12 | 12 | 1.250 | 31,750 | 29,50 | 2,117 |
| 1 3/8 дюйма — 12 | 12 | 1,375 | 34,925 | 32,75 | 2,117 |
| 1 1/2 дюйма — 12 | 12 | 1,500 | 38,100 | 36,00 | 2,117 |
Пример — типичное обозначение резьбы UNF
Лист данных межкомпонентных соединений коммутации Cisco UCS серии 6400
Обзор унифицированной вычислительной системы Cisco
Унифицированная вычислительная система Cisco ™ (Cisco UCS ® ) — это платформа центра обработки данных нового поколения, которая объединяет вычислительные ресурсы, сетевые ресурсы, доступ к хранилищам и виртуализацию в единую систему, предназначенную для снижения совокупной стоимости владения (TCO) и повысить гибкость бизнеса.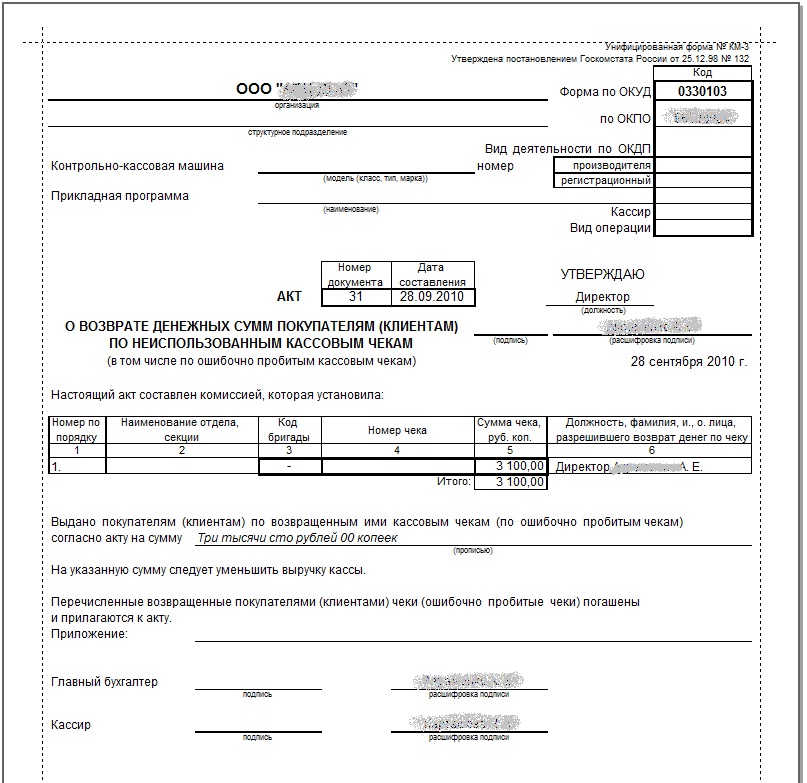 Система объединяет унифицированную сетевую структуру 10/25/40/100 Gigabit Ethernet с низкой задержкой и без потерь с серверами корпоративного класса с архитектурой x86. Система представляет собой интегрированную масштабируемую платформу с несколькими шасси, в которой все ресурсы участвуют в едином домене управления (рисунок 1).
Система объединяет унифицированную сетевую структуру 10/25/40/100 Gigabit Ethernet с низкой задержкой и без потерь с серверами корпоративного класса с архитектурой x86. Система представляет собой интегрированную масштабируемую платформу с несколькими шасси, в которой все ресурсы участвуют в едином домене управления (рисунок 1).
Рисунок 1.
Высокодоступная, связная архитектура унифицированной вычислительной системы Cisco
Обзор продукции
Межкомпонентные соединения Cisco UCS серии 6400 — это основная часть системы унифицированных вычислений Cisco, обеспечивающая как сетевое соединение, так и возможности управления для системы (рис. 2).Коммутаторы Cisco UCS серии 6400 предлагают функции линейной скорости, низкой задержки, без потерь 10/25/40/100 Gigabit Ethernet, Fibre Channel over Ethernet (FCoE) и Fibre Channel.
Cisco UCS серии 6400 обеспечивает магистраль управления и связи для блейд-серверов Cisco UCS серии B, серверного корпуса UCS 5108 серии B, управляемых стоечных серверов UCS серии C и серверов хранения UCS серии S. Все серверы, подключенные к Cisco UCS 6400 Series Fabric Interconnect, становятся частью единого высокодоступного домена управления.Кроме того, поддерживая унифицированную матрицу, Cisco UCS 6400 Series Fabric Interconnect обеспечивает подключение как LAN, так и SAN для всех серверов в своем домене.
Все серверы, подключенные к Cisco UCS 6400 Series Fabric Interconnect, становятся частью единого высокодоступного домена управления.Кроме того, поддерживая унифицированную матрицу, Cisco UCS 6400 Series Fabric Interconnect обеспечивает подключение как LAN, так и SAN для всех серверов в своем домене.
С точки зрения сети, Cisco UCS серии 6400 использует сквозную архитектуру, поддерживающую детерминированные порты 10/25/40/100 Gigabit Ethernet с низкой задержкой и скоростью передачи данных, коммутационную способность 3,82 Тбит / с для 6454, 7,42 Тбит / с. для 64108 и пропускной способности 200 Гбит / с между Fabric Interconnect серии 6400 и IOM 2408 на блейд-шасси 5108, независимо от размера пакета и включенных сервисов.Семейство продуктов поддерживает возможности унифицированной сетевой фабрики Cisco 10/25/40/100 Gigabit Ethernet с низкой задержкой и без потерь, которые повышают надежность, эффективность и масштабируемость сетей Ethernet. Межсоединение фабрики поддерживает несколько классов трафика по фабрике Ethernet без потерь от сервера через межсоединение фабрики. Значительная экономия совокупной стоимости владения достигается за счет оптимизированной для FCoE конструкции сервера, в которой можно объединить карты сетевого интерфейса (NIC), адаптеры главной шины (HBA), кабели и коммутаторы.
Значительная экономия совокупной стоимости владения достигается за счет оптимизированной для FCoE конструкции сервера, в которой можно объединить карты сетевого интерфейса (NIC), адаптеры главной шины (HBA), кабели и коммутаторы.
Фигура 2.
Межкомпонентная матрица Cisco UCS 6454
Рисунок 3.
Cisco UCS 64108
Унифицированная структура с FCoE: консолидация ввода-вывода
Межкомпонентные соединения Cisco UCS серии 6400 созданы для консолидации трафика LAN и SAN в единую унифицированную структуру, что позволяет экономить капитальные затраты (CapEx) и эксплуатационные расходы (OpEx), связанные с несколькими параллельными сетями, различными типами адаптеров, инфраструктурой коммутации и т. Д. и кабели внутри стоек.Унифицированные порты позволяют портам в межкомпонентной матрице поддерживать прямые подключения от Cisco UCS к существующим собственным сетям хранения данных Fibre Channel.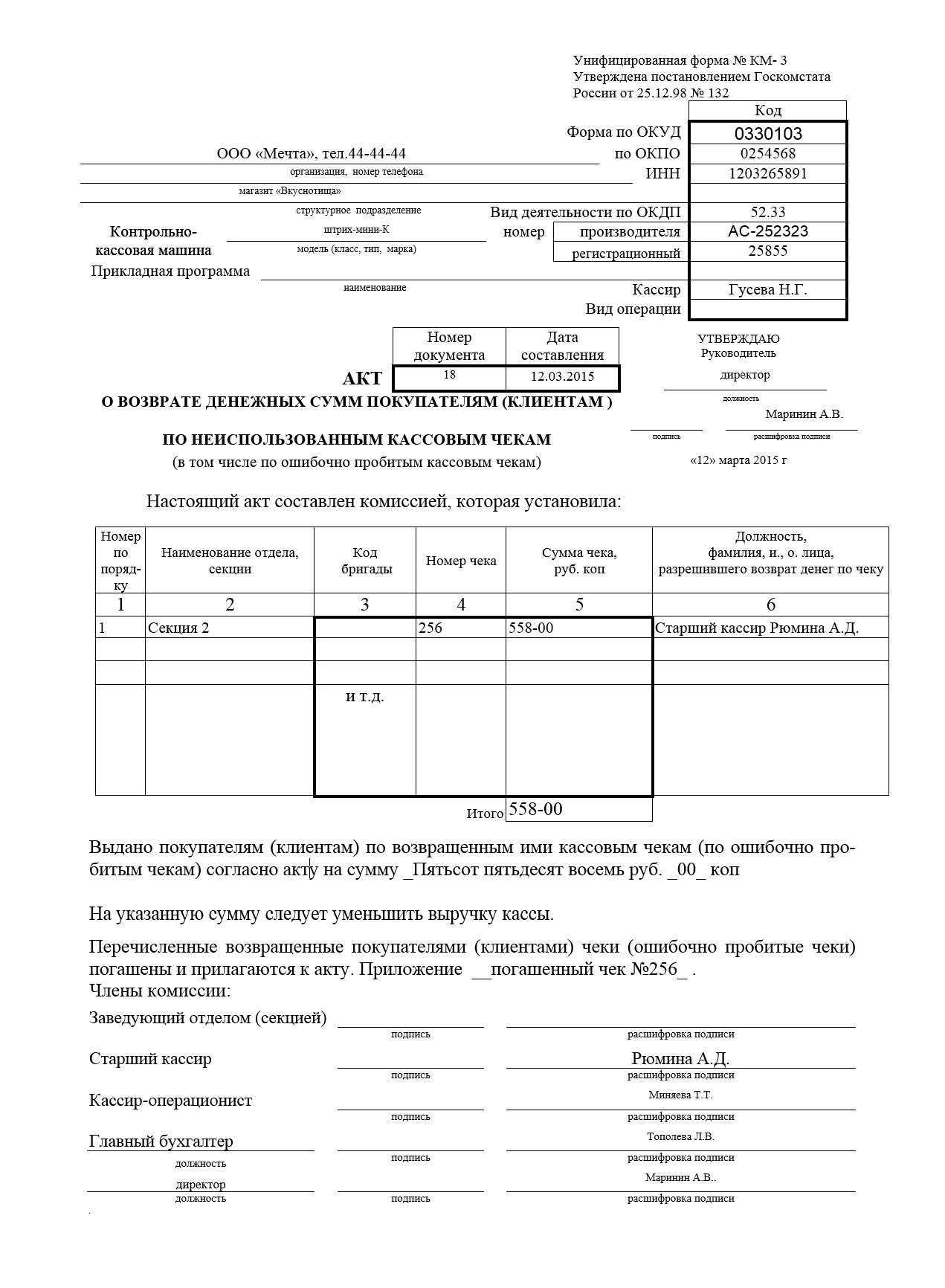 Возможность подключения FCoE к собственному Fibre Channel защищает инвестиции в существующие системы хранения и значительно упрощает прокладку кабелей в стойке.
Возможность подключения FCoE к собственному Fibre Channel защищает инвестиции в существующие системы хранения и значительно упрощает прокладку кабелей в стойке.
Менеджер Cisco UCS
Хост Cisco UCS серии 6400 и запуск Cisco UCS Manager в конфигурации высокой доступности, что позволяет межкомпонентным соединениям полностью управлять всеми элементами Cisco UCS.Подключение к корпусу блейд-сервера Cisco UCS 5108 поддерживается с помощью удлинителей коммутационной сети Cisco UCS серии 2200 и 2408 в каждом корпусе блейд-сервера. Межкомпонентные соединения Cisco UCS серии 6400 поддерживают внеполосное управление через выделенный порт управления Ethernet 10/100/1000 Мбит / с, а также внутриполосное управление. Cisco UCS Manager обычно развертывается в кластерной активной / пассивной конфигурации на избыточных межкомпонентных соединениях, подключенных через двойные порты кластеризации 10/100/1000 Ethernet.
Cisco UCS 6454 54-портовый межкомпонентный коммутатор
Коммутатор Cisco UCS 6454 54-Port Fabric Interconnect (рисунок 3) представляет собой коммутатор с одной стойкой (1RU) 10/25/40/100 Gigabit Ethernet, FCoE и Fibre Channel, обеспечивающий пропускную способность до 3,82 Тбит / с и до 54 порты. Коммутатор имеет 28 портов Ethernet 10/25 Гбит / с, 4 порта Ethernet 1/10/25 Гбит / с, 6 портов каскадирования Ethernet 40/100 Гбит / с и 16 унифицированных портов, которые могут поддерживать порты Ethernet 10/25 Гбит / с или 8 / Порты Fibre Channel 16/32 Гбит / с. Все порты Ethernet могут поддерживать FCoE.
Коммутатор имеет 28 портов Ethernet 10/25 Гбит / с, 4 порта Ethernet 1/10/25 Гбит / с, 6 портов каскадирования Ethernet 40/100 Гбит / с и 16 унифицированных портов, которые могут поддерживать порты Ethernet 10/25 Гбит / с или 8 / Порты Fibre Channel 16/32 Гбит / с. Все порты Ethernet могут поддерживать FCoE.
Вид спереди
Вид сзади
Рисунок 4.
Cisco UCS 6454 (1RU) 54-портовый межкомпонентный коммутатор
Cisco UCS 64108 108-портовая межкомпонентная сеть
Коммутатор Cisco UCS 64108 Fabric Interconnect (FI) представляет собой коммутатор 2 RU в верхней части стойки, который устанавливается в стандартную 19-дюймовую стойку, например стойку Cisco R Series. 64108 — это коммутатор 10/25/40/100 Gigabit Ethernet, FCoE и Fibre Channel, предлагающий до 7 коммутаторов.Пропускная способность 42 Тбит / с и до 108 портов. Коммутатор имеет 16 унифицированных портов (номера портов 1-16), которые могут поддерживать порты Ethernet 10/25 Гбит / с SFP28 или порты Fibre Channel 8/16/32 Гбит / с, 72 порта Ethernet SFP28 10/25 Гбит / с (номера портов 17- 88), 8 портов Ethernet SFP28 1/10/25 Гбит / с (номера портов 89-96) и 12 портов восходящего канала Ethernet QSFP28 40/100 Гбит / с (номера портов 97-108). Все порты Ethernet могут поддерживать FCoE.
Все порты Ethernet могут поддерживать FCoE.
Cisco UCS 64108 Fabric Interconnect также имеет один порт управления сетью, один консольный порт для настройки начальной конфигурации и один порт USB для сохранения или загрузки конфигураций.FI также включает порты L1 / L2 для подключения двух межкомпонентных соединений для обеспечения высокой доступности.
Вид спереди
Вид сзади
Рисунок 5.
Cisco UCS 64108 (2 RU) 108-портовый межкомпонентный коммутатор
В таблице 1 приведены характеристики межкомпонентных соединений Cisco UCS серии 6400.
Таблица 1. Характеристики межкомпонентных соединений Cisco UCS серии 6400
Товар | Cisco UCS 6454 | Cisco UCS 64108 |
Описание | 54-портовый межкомпонентный коммутатор | Межкомпонентная матрица на 108 портов |
Форм-фактор | 1RU | 2RU |
Количество фиксированных портов 10/25/40/100 Гбит / с и FCoE с дополнительными унифицированными портами | 54 фиксированных порта | 108 фиксированных портов |
Максимальное количество унифицированных портов | 16 (унифицированные порты 1-16) | 16 (унифицированные порты 1-16) |
Максимальное количество портов Ethernet 1 Гбит / с | 4 (порты 45-48) | 8 (порты 89-96) |
Максимальное количество портов Ethernet 40/100 Гбит / с | 6 (порты 49-54) | 12 ((порты 97-108) |
Пропускная способность | 3. | 7,42 Тбит / с |
Вентиляторные модули | 3 + 1 | 2 + 1 |
 82 Тбит / с
82 Тбит / сПримечание. Коммутационные кабели для восходящего канала поддерживаются на портах 49-54 (FI 6454) и 97-108 (FI 64108) при подключении к коммутаторам Nexus 9K.
Примечание: Начиная с версии 4.1 (3), FI 6454 и 64108 поддерживают серверные порты на портах 40 / 100G после отключения (порты 49-54 и 97-108 соответственно).На портах 40 / 100G поддерживаются только стоечные серверы с прямым подключением на скоростях 10/25 Гбит / с с VIC 1455/1457. Обратите внимание, что порт сервера со скоростью 40/100 Гбит / с не поддерживается. FI 6454 может поддерживать максимум 64 серверных порта, а FI 64108 может поддерживать 128 серверных портов после выхода 40/100 Гбит / с.
Особенности и преимущества
Таблица 2 обобщает функции и преимущества межкомпонентных соединений Cisco UCS серии 6400.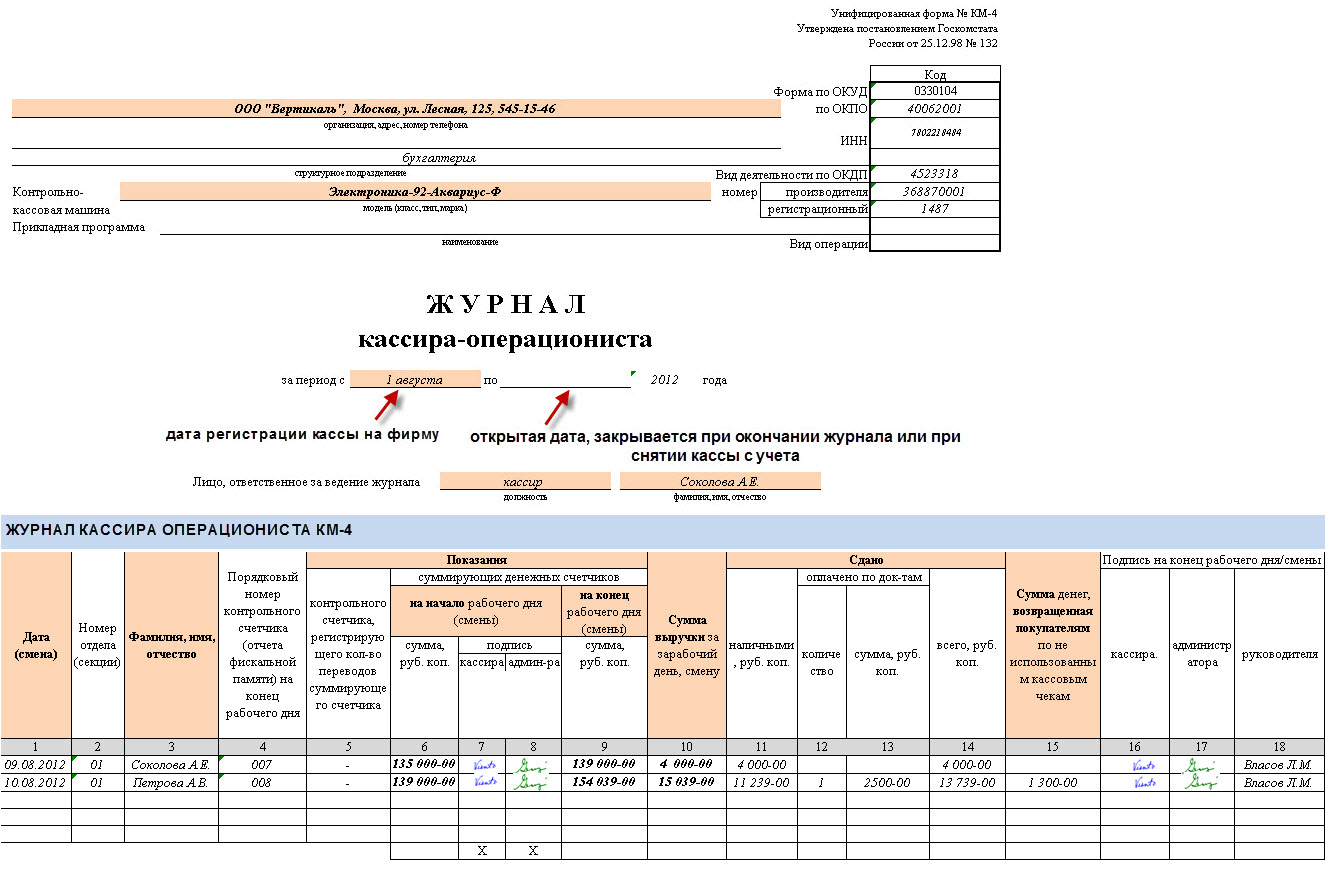
Таблица 2. Характеристики и преимущества
Элемент | Преимущества |
Электропитание | ● Два источника питания (переменного или постоянного тока) |
Управление с помощью Cisco UCS Manager | ● Позволяет всем элементам, подключенным к межсоединениям, участвовать в едином домене управления с высокой доступностью. |
Унифицированная ткань | ● Снижает совокупную стоимость владения за счет уменьшения количества требуемых сетевых адаптеров, HBA, коммутаторов и кабелей. ● Прозрачно инкапсулирует пакеты Fibre Channel в Ethernet. |
Архитектура удлинителя ткани | ● Масштабирование до 20 блейд-шасси без увеличения сложности за счет устранения необходимости в выделенном управлении шасси и блейд-коммутаторах, а также за счет уменьшения количества необходимых кабелей. ● Обеспечивает детерминированную задержку для оптимизации производительности приложений. |
Производительность | ● Обеспечивает высокоскоростное подключение к корпусу с малой задержкой. ● Обеспечивает примерно 50-процентное сокращение сквозной задержки системы (задержка менее 1 микросекунды). |
Ткань без потерь | ● Обеспечивает надежную прочную основу для объединения трафика LAN и SAN на едином транспорте. |
Управление потоком на основе приоритета (PFC) | ● Упрощает управление несколькими потоками трафика по одному сетевому каналу. ● Поддерживает разные классы обслуживания, помогая задействовать как потери, так и классический Ethernet в одной и той же фабрике. |
Управление пропускной способностью системы | ● Помогает обеспечить согласованное и согласованное качество обслуживания (QoS) во всей системе. |
Задние порты | ● Помогает сохранить короткие и эффективные кабели. |
Резервные вентиляторы и блоки питания с возможностью горячей замены | ● Помогает обеспечить высокую доступность в нескольких конфигурациях. ● Повышение удобства обслуживания ● Обеспечивает бесперебойное обслуживание во время технического обслуживания. |
Охлаждение спереди назад | ● Забор воздуха со стороны вентилятора, выхлоп со стороны левого порта. |
Порты SFP + | ● Повышает гибкость с помощью ряда решений для межсоединений, включая медный твинаксиальный кабель для коротких участков и оптику SFP28 и QSFP28 для длинных участков. ● Потребляет меньше энергии на порт, чем традиционные решения. ● Помогает обеспечить рентабельные соединения на повторителях фабрики с Cisco. Оптика ® Fabric Extender Transceiver (FET) |
Порты, совместимые с SFP28 | ● Позволяет настраивать фиксированные порты для работы в режиме Ethernet 10/25 ГБ с опциями приемопередатчика, специфичными для использования с портами, совместимыми с SFP28, в таблице 3. |
Порты, совместимые с QSFP28 | ● Позволяет настроить все порты для работы в режиме 40/100 ГБ Ethernet с параметрами приемопередатчика, специфичными для использования с QSFP28-совместимыми портами, указанными в таблице 3. |
Варианты лицензирования на основе портов | ● Помогает реализовать модель с оплатой по мере роста, позволяя клиентам увеличивать емкость по мере увеличения сетевых потребностей отдельной системы. |
Характеристики
Трансиверы
Межкомпонентные соединения Cisco UCS серии 6400 поддерживают широкий спектр вариантов подключения 10/25/40/100 Gigabit Ethernet с использованием модулей Cisco 10/25/40/100 Gbps.Унифицированные порты (UP) на Cisco UCS серии 6400 поддерживают подключение 10/25 Gigabit Ethernet или модули 8/16/32 Gigabit Fibre Channel. Порты каскадирования поддерживают приемопередатчики и кабели 40/100 Gigabit Ethernet. В таблице 3 перечислены поддерживаемые варианты трансиверов.
Порты каскадирования поддерживают приемопередатчики и кабели 40/100 Gigabit Ethernet. В таблице 3 перечислены поддерживаемые варианты трансиверов.
Таблица 3. Cisco UCS 6400 Series Fabric Interconnect ‒ поддерживаемый приемопередатчик и матрица поддержки кабелей
Номер продукта | Описание |
1-гигабитные трансиверы SFP | |
GLC-TE | Модуль приемопередатчика 1000 BASE-T SFP для медного провода категории 5 |
GLC-SX-MMD | 1000 BASE-SX коротковолновый; с ДОМ |
SFP-GE-T | Модуль приемопередатчика 1000 BASE-T SFP для медного провода категории 5, расширенный диапазон рабочих температур (поддерживается, но EOL) |
Трансиверы SFP + 10 Гбит / с | |
SFP-10G-SR | Модуль SFP 10GBASE-SR |
SFP-10G-SR-S | Модуль SFP 10GBASE-SR, корпоративный класс |
SFP-10G-LR | Модуль SFP 10GBASE-LR |
SFP-10G-LR-S | Модуль SFP 10GBASE-LR, корпоративный класс |
SFP-10G-LRM | Модуль SFP 10GBASE-LRM |
SFP-10G-ER | Модуль SFP 10GBASE-ER |
SFP-10G-ER-S | Модуль 10GBASE-ER-SFP, корпоративный класс |
SFP-10G-ZR | Модуль Cisco 10GBASE-ZR SFP10G для SMF |
SFP-10G-ZR-S | Модуль SFP 10GBASE-ZR, корпоративный класс |
FET-10G | Удлинитель линии 10G для FEX |
Приемопередатчики SFP28 25 Гбит / с | |
SFP-25G-SR-S | Модуль SFP 25GBASE-SR |
SFP-10 / 25G-LR-S | Модуль 10 / 25GBASE-LR SFP28 для SMF |
SFP-10 / 25G-CSR-S | Двухскоростной модуль 10 / 25GBASE-CSR SFP |
Приемопередатчики QSFP + 40 Гбит / с | |
QSFP-40G-SR4 | Модуль приемопередатчика 40GBASE-SR4 QSFP с разъемом MPO |
QSFP-40G-SR4-S | Модуль приемопередатчика 40GBASE-SR4 QSFP, разъем MPO, корпоративный класс |
QSFP-40G-SR-BD | 40GBASE-SR-BiDi, дуплексный MMF (LC) |
QSFP-40G-LR4 | Приемопередатчик OTN QSFP 40GBASE-LR4, LC, 10 км |
QSFP-40G-LR4-S | Модуль приемопередатчика QSFP 40GBASE-LR4, LC, 10 км, корпоративный класс |
QSFP-40G-ER4 | Модуль приемопередатчика QSFP 40GBASE-ER4, LC, 2 км |
WSP-Q40GLR4L | QSFP 40G Ethernet — LR4 lite, LC, 2 км |
QSFP-4X10G-LR-S | Модуль приемопередатчика QSFP 4x10G, SM MPO, 10 км, корпоративный класс |
Приемопередатчики QSFP28 100G | |
QSFP-100G-SR4-S | Приемопередатчик 100GBASE SR4 QSFP, MPO, 100 м через OM4 MMF |
QSFP-100G-LR4-S | Приемопередатчик 100GBASE LR4 QSFP, LC, 10 км через SMF |
QSFP-40/100-SRBD | 100GBASE / 40GBASE SR-BiDi QSFP-трансивер, LC, 100 м через OM4 MMF |
QSFP-100G-SM-SR | Приемопередатчик 100GBASE CWDM4 Lite QSFP, 2 км через SMF, 10-60C |
Медные кабели SFP + 10G со встроенными трансиверами | |
SFP-h20GB-CU1M | Кабель 10GBASE SFP + 1 метр, пассивный |
SFP-h20GB-CU1-5M | Кабель 10GBASE SFP + 1. |
SFP-h20GB-CU2M | Кабель 10GBASE SFP + 2 метра, пассивный |
SFP-h20GB-CU2-5M | Кабель 10GBASE SFP + 2,5 метра, пассивный |
SFP-h20GB-CU3M | Кабель 10GBASE SFP + 3 метра, пассивный |
SFP-h20GB-CU5M | Кабель 10GBASE SFP + 5 метров, пассивный |
SFP-h20GB-ACU7M | Кабель 10GBASE SFP + 7 метров, активный |
SFP-h20GB-ACU10M | Кабель 10GBASE SFP + 10 метров, активный |
SFP-10G-AOC1M | Активный оптический кабель SFP + 10GBASE, 1 м |
SFP-10G-AOC2M | Активный оптический кабель SFP + 10GBASE, 2M |
SFP-10G-AOC3M | Активный оптический кабель SFP + 10GBASE, 3M |
SFP-10G-AOC5M | Активный оптический кабель SFP + 10GBASE, 5 м |
SFP-10G-AOC7M | Активный оптический кабель SFP + 10GBASE, 7M |
SFP-10G-AOC10M | Активный оптический кабель SFP + 10GBASE, 10M |
Медные кабели SFP28 25G со встроенным | |
SFP-h35G-CU1M | 25GBASE-CU SFP28 кабель 1 метр |
SFP-h35G-CU2M | Кабель 25GBASE-CU SFP28, 2 метра |
SFP-h35G-CU3M | Кабель 25GBASE-CU SFP28, 3 метра |
SFP-h35G-CU4M | 25GBASE-CU SFP28 Кабель 4 метра |
SFP-h35G-CU5M | Кабель 25GBASE-CU SFP28, 5 метров |
SFP-25G-AOC1M | Активный оптический кабель SFP28 25GBASE, 1 м |
SFP-25G-AOC2M | Активный оптический кабель SFP28 25GBASE, 2M |
SFP-25G-AOC3M | Активный оптический кабель SFP28 25GBASE, 3M |
SFP-25G-AOC4M | Активный оптический кабель SFP28 25GBASE, 4 м |
SFP-25G-AOC5M | 25GBASE активный оптический порт SFP28, 5M |
SFP-25G-AOC7M | Активный оптический кабель SFP28 25GBASE, 7 м |
SFP-25G-AOC10M | Активный оптический кабель SFP28 25GBASE, 10 м |
Кабели QSFP 40G со встроенными трансиверами | |
QSFP-h50G-CU1M | Пассивный медный кабель 40GBASE-CR4, 1M |
QSFP-h50G-CU3M | Пассивный медный кабель 40GBASE-CR4, 3M |
QSFP-h50G-CU5M | Пассивный медный кабель 40GBASE-CR4, 5 м |
QSFP-h50G-ACU7M | Активный медный кабель 40GBASE-CR4, 7M |
QSFP-h50G-ACU10M | Активный медный кабель 40GBASE-CR4, 10 м |
QSFP-h50G-AOC1M | Активный оптический кабель 40GBASE, 1 м |
QSFP-h50G-AOC2M | Активный оптический кабель 40GBASE, 2M |
QSFP-h50G-AOC3M | Активный оптический кабель 40GBASE, 3M |
QSFP-h50G-AOC5M | Активный оптический кабель 40GBASE, 5 м |
QSFP-h50G-AOC10M | Активный оптический кабель 40GBASE, 10 м |
QSFP-h50G-AOC15M | Активный оптический кабель 40GBASE, 15 м |
QSFP-4SFP10G-CU1M | Пассивный медный разветвитель QSFP на 4xSFP10G, 1 м |
QSFP-4SFP10G-CU3M | Пассивный медный разветвитель QSFP на 4xSFP10G, соболь, 3М |
QSFP-4SFP10G-CU5M | Пассивный медный разветвитель QSFP на 4xSFP10G, 5M |
QSFP-4x10G-AC7M | Активный медный разветвитель от QSFP на 4xSFP10G, 7M |
QSFP-4x10G-AC10M | Активный медный разветвитель от QSFP на 4xSFP10G, 10 м |
QSFP-4x10G-AOC1M | Активный оптический переходной кабель от QSFP к 4SFP 40GBASE, 1 м |
QSFP-4x10G-AOC3M | Активный оптический переходной кабель от QSFP к 4SFP 40GBASE, 3M |
QSFP-4x10G-AOC5M | 40GBASE активный оптический переходной кабель от QSFP к 4SFP, 5 м |
QSFP-4x10G-AOC7M | Активный оптический переходной кабель от QSFP к 4SFP 40GBASE, 7M |
QSFP-4x10G-AOC10M | Активный оптический переходной кабель от QSFP к 4SFP 40GBASE, 10 м |
Кабели QSFP28 100G со встроенными трансиверами | |
QSFP-100G-CU1M | Пассивный медный кабель 100GBASE-CR4, 1М |
QSFP-100G-CU2M | Пассивный медный кабель 100GBASE-CR4, 2M |
QSFP-100G-CU3M | Пассивный медный кабель 100GBASE-CR4, 3M |
QSFP-100G-AOC1M | Активный оптический кабель 100GBASE QSFP, 1М |
QSFP-100G-AOC2M | Активный оптический кабель 100GBASE QSFP, 2M |
QSFP-100G-AOC3M | Активный оптический кабель 100GBASE QSFP, 3M |
QSFP-100G-AOC5M | Активный оптический кабель 100GBASE QSFP, 5 м |
QSFP-100G-AOC7M | Активный оптический кабель 100GBASE QSFP, 7M |
QSFP-100G-AOC10M | Активный оптический кабель 100GBASE QSFP, 10 м |
QSFP-100G-AOC15M | Активный оптический кабель 100GBASE QSFP, 15 м |
QSFP-100G-AOC20M | Активный оптический кабель 100GBASE QSFP, 20 м |
QSFP-100G-AOC25M | Активный оптический кабель 100GBASE QSFP, 25 м |
QSFP-100G-AOC30M | Активный оптический кабель 100GBASE QSFP, 30 м |
QSFP-4SFP25G-CU1M | Пассивный медный разветвитель от 100GBASE QSFP на 4xSFP25G, 1 м |
QSFP-4SFP25G-CU2M | Пассивный медный разветвитель от 100GBASE QSFP на 4xSFP25G, 2M |
QSFP-4SFP25G-CU3M | Пассивный медный разветвитель от 100GBASE QSFP на 4xSFP25G, 3M |
QSFP-4SFP25G-CU5M | Пассивный медный разветвитель от 100GBASE QSFP на 4xSFP25G, 5 м |
Приемопередатчики Fibre Channel | |
DS-SFP-FC4G-SW | 4 Гбит / с Fibre Channel-SW SFP, LC |
DS-SFP-FC8G-SW | 8 Гбит / с Fibre Channel-SW SFP +, LC |
DS-SFP-FC8G-LW | 8 Гбит / с Fibre Channel-LW SFP +, LC |
DS-SFP-FC16G-SW | 16 Гбит / с Fibre Channel-SW SFP +, LC |
DS-SFP-FC16G-LW | Fibre Channel-LW SFP +, 16 Гбит / с, LC |
DS-SFP-FC32G-SW | 32 Гбит / с Fibre Channel-SW SFP +, LC |
DS-SFP-FC32G-LW | 32 Гбит / с Fibre Channel-LW SFP +, LC |
 5-метровый, пассивный
5-метровый, пассивныйПримечание:
1. FI 6454 поддерживает оптику 1G на портах 45-48. FI 64108 поддерживает оптику 1G на портах 89-96.
FI 6454 поддерживает оптику 1G на портах 45-48. FI 64108 поддерживает оптику 1G на портах 89-96.
2. Модули и кабели приемопередатчиков, которые поддерживаются конкретным межкомпонентным соединением, не всегда поддерживаются на всех адаптерах VIC, модулях ввода-вывода или удлинителях матрицы, которые совместимы с этим межкомпонентным соединением. Подробные таблицы совместимости модулей приемопередатчика доступны здесь: https://www.cisco.com/c/en/us/support/interfaces-modules/transceiver-modules/products-device-support-tables-list.html.
3. SFP-10 / 25G-LR-S и SFP-10 / 25G-CSR-S в настоящее время работают только на скорости 25G. (т.е. FI 6454 поддерживает порты 1-48 и FI 64108 поддерживает порты 1-96)
4. Трансиверы S-класса не поддерживают FCoE на скоростях 10G и 40G
5. QSFP-4X10G-LR-S поддерживается только для портов восходящей связи.
Кабельная проводка
В таблице 4 представлены спецификации кабелей 10, 25, 40 и 100 Gigabit Ethernet для межкомпонентных соединений Cisco UCS серии 6400.
Таблица 4. Технические характеристики кабелей 10, 25, 40 и 100 Gigabit Ethernet
Разъем (носитель) | Кабель | Расстояние | Мощность (с каждой стороны) | Задержка трансивера (ссылка) | Стандартный |
SFP + медь (CU) | Twinax | 1, 3 и 5M | Примерно 0.1 ватт (Вт) | Примерно 0,1 мкс | SFF 8431 |
SFP + ACU медный | Активный Twinax | 7М10М | Приблизительно 0,5 Вт | Примерно 0,1 мкс | SFF 8461 |
SFP + FET | мм OM2MM OM3MM OM4 | 25 и 100M | 1 Вт | Примерно 0 мкс | IEEE 802. |
SFP + Short Reach (SR) и MMF | мм OM2MM OM3MM OM4 | 82 и 300М | 1 Вт | Примерно 0 микросекунд | IEEE 802.3ae |
SFP + Long Reach (LR) | SMF | 10 км | 1 Вт | Примерно 0 микросекунд | IEEE 802.3ae |
SFP + Long Range (ER) | SMF | 40 км | 1,5 Вт | Примерно 0 микросекунд | IEEE 802.3ae |
SFP + Long Reach (ZR) | SMF | 80 км | 1. | Примерно 0 микросекунд | IEEE 802.3ae |
 3ae
3ae 5 Вт
5 ВтПроизводительность
● Cisco UCS 6454: аппаратная пересылка уровня 2 со скоростью 3,82 Тбит / с и 1,2 миллиарда пакетов в секунду (бит / с)
● Cisco UCS 64108: аппаратная пересылка уровня 2 со скоростью 7,42 Тбит / с и 2,8 миллиарда пакетов в секунду (бит / с)
● Записи в таблице MAC-адресов: 32 000
● Сквозная конструкция с малой задержкой: обеспечивает предсказуемую и стабильную задержку трафика независимо от размера пакета, структуры трафика или включенных функций.
Уровень 2
● Режим коммутатора Ethernet
● Режим коммутатора Fibre Channel
● Порты межсоединения уровня 2 и 3K VLAN
● IEEE 802.Инкапсуляция VLAN за 1 квартал
● Поддержка виртуальных сетей SAN (VSAN) на межсоединение
● Rapid Per-VLAN Spanning Tree Plus RPVST +
● Отслеживание версий 1, 2 и 3 протокола управления группами Интернета (IGMP)
● Протокол управления агрегированием каналов (LACP): IEEE 802. 3ad
3ad
● Расширенное хеширование EtherChannel на основе информации уровней 2, 3 и 4
● Jumbo-кадры на всех портах (до 9216 байт)
● Приостановить кадры (IEEE 802.3x)
● Обнаружение и восстановление медленного слива FC / FCoE
● Безопасность порта
Качество обслуживания (QoS)
● Уровень 2 IEEE 802.1p (класс обслуживания)
● Шестнадцать аппаратных очередей на порт (FCoE плюс пять определяемых пользователем)
● Очередь на выходе на основе класса обслуживания (CoS)
● Планирование на основе выходного порта: Weighted Round-Robin (WRR)
● Управление потоком на основе приоритета (802.1Qbb)
● Расширенный выбор передачи (802.1Qaz)
Высокая доступность
● Заменяемые в горячем режиме источники питания, модули вентиляторов и модули расширения
● Резервирование питания 1 + 1
● Резервирование модуля вентиляторов N + 1
Менеджмент
● Управление межсоединениями с использованием избыточного управления 10/100/1000 Мбит / с или консольных портов
● Все управление осуществляется через Cisco UCS Manager. Пожалуйста, обратитесь к таблице данных Cisco UCS Manager для получения дополнительной информации об интерфейсах управления
Пожалуйста, обратитесь к таблице данных Cisco UCS Manager для получения дополнительной информации об интерфейсах управления
Унифицированная сетевая матрица 10/25/40/100 Gigabit Ethernet с низкой задержкой и без потерь
● PFC (поддержка приоритетного кадра паузы)
● Протокол мостового обмена центра обработки данных (DCBX)
● IEEE 802.1Qaz: управление полосой пропускания
Унифицированные порты
● Cisco UCS серии 6400 можно настроить как 10- и 25-гигабитный Ethernet или 8/16/32-гигабитный канал Fibre Channel
.Отраслевые стандарты
● IEEE 802.1p: Приоритизация CoS
● IEEE 802.1Q: теги VLAN
● IEEE 802.1s: несколько экземпляров VLAN протокола связующего дерева
● IEEE 802.1w: быстрая реконфигурация протокола связующего дерева
● IEEE 802.3: Ethernet
● IEEE 802.3ad: LACP
● IEEE 802.3ae: 10-гигабитный Ethernet
● IEEE 802. 3by: 25-гигабитный Ethernet
3by: 25-гигабитный Ethernet
● IEEE 802.3bg: 40-гигабитный Ethernet
● IEEE 802.3bm: 100-гигабитный Ethernet
● Поддержка SFP28
● Поддержка QSFP28
● Удаленный мониторинг (RMON)
Физические характеристики
Оптика SFP28 и QSFP28
Продукты Cisco UCS поддерживают медные твинаксиальные кабели 10, 25, 40 и 100 Gigabit Ethernet SFP28 и QSFP28 для коротких расстояний и оптику SFP28 и QSFP28 для больших расстояний. SFP28 и QSFP28 имеют несколько преимуществ по сравнению с другими вариантами подключения Ethernet:
● Форм-фактор 10, 25, 40 и 100 Gigabit Ethernet
● Низкое энергопотребление
● Устройства с горячей заменой
В Таблице 5 приведены технические характеристики межкомпонентного соединения Cisco UCS серии 6400.
Таблица 5. Технические характеристики межкомпонентного соединения Cisco UCS серии 6400 ****
Элемент | Cisco UCS 6454 | Cisco UCS 64108 |
Порты | 48 портов SFP28 10/25 Гбит / с и 6 портов QSFP28 40/100 Гбит / с | 96 портов SFP28 10/25 Гбит / с и 12 портов QSFP28 40/100 Гбит / с |
Поддерживаемые скорости нисходящего канала | 1/10/25-Гбит / с Ethernet / FCoE8 / 16/32-Гбит / с Fibre Channel | 1/10/25-Гбит / с Ethernet / FCoE8 / 16/32-Гбит / с Fibre Channel |
CPU | 6 ядер | 6 ядер |
Системная память | 64 ГБ | 64 ГБ |
Порты управления | Порты L1, L2 и RJ-45 | Порты L1, L2 и RJ-45 |
Порты USB | 1 | 1 |
Источники питания (до 2) | 650 Вт (переменный ток) или 930 Вт (постоянный ток) | Два одинаковых переменного или постоянного тока |
Типовая рабочая мощность | 260 Вт | 404 Вт |
Максимальная мощность (перем. | 650 Вт | 1200 Вт |
Максимальная мощность (постоянный ток) | 930 Вт | 930 Вт |
Входное напряжение (AC) | от 100 до 240 В переменного тока | 7A при 200 В переменного тока |
Входное напряжение (постоянный ток) | от -40 до -72 В постоянного тока | 23 А максимум при -48 В постоянного тока |
Частота | от 50 до 60 Гц | от 50 до 60 Гц |
Вентиляторы | 4 | 3 |
Расход воздуха | Стандартный воздушный поток — спереди (со стороны блока питания / вентилятора) назад (выпуск со стороны портов) | Стандартный воздушный поток — спереди (со стороны блока питания / вентилятора) назад (выпуск со стороны портов) |
КПД (переменный ток) | от 95 до 98% (нагрузка от 50 до 100%) | от 95 до 98% (нагрузка от 50 до 100%) |
КПД (пост. | от 88 до 92% (нагрузка от 50 до 100%) | от 88 до 92% (нагрузка от 50 до 100%) |
Соответствие RoHS | Есть | Есть |
С возможностью горячей замены | Есть | Есть |
 Ток)
Ток)  Ток)
Ток) Физические характеристики и условия эксплуатации Cisco UCS серии 6400
В таблице 6 приведены физические характеристики и характеристики среды для межкомпонентных соединений Cisco UCS серии 6400.
Таблица 6. Физические характеристики и условия окружающей среды
Имущество | Cisco UCS 6454 | Cisco UCS 64108 |
Физические (высота x ширина x глубина) | 1,72 дюйма x 17,3 дюйма x 22,5 дюйма (4,4 см x 43,9 см x 57,1 см) | 3. |
Рабочая температура | от 32 до 104 ° F (от 0 до 40 ° C) | от 32 до 104 ° F (от 0 до 40 ° C) |
Нерабочая температура | 40 до 158 ° F (40 до 70 ° C) | 40 до 158 ° F (40 до 70 ° C) |
Влажность | от 5 до 95% | от 5 до 95% |
Высота | от 0 до 13,123 футов (от 0 до 4000 м) | от 0 до 13,123 футов (от 0 до 4000 м) |
 38 дюймов x 17,42 дюйма x 22,95 дюйма (8,33 см x 44,25 см x 58,29 см)
38 дюймов x 17,42 дюйма x 22,95 дюйма (8,33 см x 44,25 см x 58,29 см)Масса
В таблице 7 приведены веса Cisco UCS серии 6400.
Таблица 7. Вес, включая блоки питания и модули вентиляторов
Вес, включая блоки питания и модули вентиляторов
Компонент | Масса |
Cisco UCS 6454 с двумя блоками питания и двумя установленными модулями расширения | 22,24 фунта (10,10 кг), с вентиляторами |
Cisco UCS 64108 с двумя блоками питания и двумя установленными модулями расширения | 35.86 фунтов (16,27 кг), с вентиляторами |
Соответствие нормативным стандартам: безопасность и электромагнитная совместимость
Таблица 8 обобщает соответствие нормативным требованиям для межкомпонентных соединений Cisco UCS серии 6400.
Таблица 8. Соответствие нормативным стандартам: безопасность и ЭМС
Спецификация | Описание |
Соответствие нормативным требованиям | Продукция должна соответствовать маркировке CE в соответствии с директивами 2004/108 / EC и 2006/95 / EC. |
Безопасность | ● UL 60950-1, второе издание ● CAN / CSA-C22.2 № 60950-1 ● EN 60950-1, второе издание ● IEC 60950-1, второе издание ● AS / NZS 60950-1 ● GB4943 |
ЭМС: выбросы | ● 47CFR, часть 15 (CFR 47), класс A ● AS / NZS CISPR22, класс A ● CISPR22, класс A ● EN55022, класс A ● ICES003, класс A ● VCCI, класс A ● EN61000-3-2 ● EN61000-3-3 ● KN22, класс A ● CNS13438, класс A |
ЭМС: устойчивость | ● EN55024 ● CISPR24 ● EN300386 ● Серия КН 61000-4 |
RoHS | Продукт соответствует требованиям RoHS 5, за исключением шариков с шариковой решеткой (BGA) и запрессовываемых выводов. |

Информация для заказа
В таблице 9 представлена информация для заказа межкомпонентных соединений Cisco UCS 6400 Fabric.
Таблица 9. Информация для заказа
Номер детали | Описание |
Межкомпонентные межкомпонентные соединения | |
UCS-FI-6454-U | Автономная модель: 1RU FI, без блока питания, с 54 портами и включает лицензии на порты 18×10 / 25-Gbps и 2×40 / 100-Gbps |
UCS-FI-6454 ++ | Автономная модель: TAA-UCS 6454 1RU FI, без блока питания, с 54 портами и включает лицензии на 18 портов 10/25 Гбит / с и 2 порта 40/100 Гбит / с |
UCS-FI-6454 | Настроенная модель: UCS 6454 1RU FI, без блока питания, с 54 портами и включает лицензии портов 18×10 / 25-Gbps и 2×40 / 100-Gbps |
UCS-FI-64108-U | Автономная модель: UCS 64108 2RU FI, без блока питания, со 108 портами и включает лицензии на порты 36×10 / 25-Gbps и 4×40 / 100-Gbps |
UCS-FI-64108 | Настроенная модель: UCS 64108 2RU FI, без блока питания, со 108 портами и включает лицензии на порты 36×10 / 25-Gbps и 4×40 / 100-Gbps |
Лицензии на порт Fabric Interconnect | |
UCS-L-6400-25G | ТОЛЬКО для серии UCS 6400 Fabric Int 1 порт 10/25 Гбит / с / лицензия на порт FC |
UCS-L-6400-25GC | ТОЛЬКО для серии UCS 6400 Fabric Int 1 Лицензия порта 10/25 Гбит / с / FC Только C-direct (используется для прямого подключения от FI 6454 к C220, C240, C460, C480 и / или C4200) |
UCS-L-6400-100G | ТОЛЬКО для UCS серии 6400 Fabric Int 1 Лицензия порта 40/100 Гбит / с |
Блок питания и вентилятор | |
UCS-PSU-6332-AC | UCS 6332/6454 источник питания / 100-240 В переменного тока (650 Вт) |
UCS-PSU-6332-DC | Источник питания UCS 6332/6454 / -48 В постоянного тока (930 Вт) |
UCS-PSU-64108-AC | UCS 64108 источник питания / 100-240 В перем. |
UCS-PSU-6332-DC | UCS 64108 Источник питания / -48 В постоянного тока |
UCS-FAN-6332 | UCS 6332/6454 вентиляторный модуль |
UCS-FAN-64108 | UCS 64108 вентиляторный модуль |
Принадлежность и заглушка | |
UCS-ACC-6332 | Комплект принадлежностей для шасси UCS 6332/6454 |
UCS-ACC-64108 | Комплект принадлежностей для шасси UCS 64108 |
 Тока
ТокаИнформация о гарантии
Найдите информацию о гарантии на сайте Cisco. com на странице «Гарантии на продукт».
com на странице «Гарантии на продукт».
Экологическая устойчивость Cisco
Информация о политике и инициативах Cisco по обеспечению экологической устойчивости в отношении наших продуктов, решений, операций и расширенных операций или цепочки поставок представлена в разделе «Экологическая устойчивость» отчета Cisco по корпоративной социальной ответственности (CSR).
Ссылки на информацию о ключевых темах экологической устойчивости (упомянутых в разделе «Экологическая устойчивость» отчета о корпоративной социальной ответственности) представлены в следующей таблице:
Тема устойчивого развития | Номер ссылки |
Информация о законах и правилах, касающихся содержания материалов в продукте | Материалы |
Информация о законах и правилах по утилизации электронных отходов, включая продукты, батареи и упаковку | Соответствие WEEE |
Cisco предоставляет данные об упаковке только в информационных целях. Он может не отражать самые последние правовые изменения, и Cisco не представляет, не гарантирует и не гарантирует, что он является полным, точным или актуальным. Эта информация может быть изменена без предварительного уведомления.
Он может не отражать самые последние правовые изменения, и Cisco не представляет, не гарантирует и не гарантирует, что он является полным, точным или актуальным. Эта информация может быть изменена без предварительного уведомления.
Услуги Cisco для унифицированных вычислений
Используя единое представление ресурсов центра обработки данных, Cisco и наши ведущие партнеры в отрасли предоставляют услуги, ускоряющие переход к унифицированной вычислительной архитектуре. Услуги Cisco для унифицированных вычислений помогут вам быстро развернуть ресурсы центра обработки данных, упростить текущие операции и оптимизировать инфраструктуру, чтобы лучше соответствовать потребностям вашего бизнеса.Для получения дополнительной информации об этих и других услугах Cisco для центров обработки данных посетите https://www.cisco.com/go/unifiedcomputingservices.
Почему именно Cisco?
Унифицированная вычислительная система Cisco продолжает долгую историю инноваций Cisco в области предоставления интегрированных систем для улучшения бизнес-результатов на основе отраслевых стандартов и использования сети в качестве платформы. Недавние примеры включают IP-телефонию, коммутацию LAN, унифицированные коммуникации и унифицированный ввод-вывод. Cisco начала фазу унифицированных вычислений в рамках нашей стратегии унифицированного центра обработки данных несколько лет назад, собрав опытную команду из вычислительной индустрии и виртуализации, чтобы пополнить наш собственный опыт работы с сетями и доступом к хранилищам.В результате Cisco предоставила базовые технологии, включая семейство Cisco Nexus ® , поддерживающие унифицированную структуру и виртуализацию серверов. Cisco UCS завершает этот этап, предлагая инновации в архитектуре, технологиях, партнерских отношениях и услугах. Cisco имеет хорошие возможности для внедрения этой инновации, используя системный подход к вычислениям, который объединяет сетевой интеллект и масштабируемость с инновационными специализированными интегральными схемами, интегрированным управлением и стандартными вычислительными компонентами.
Недавние примеры включают IP-телефонию, коммутацию LAN, унифицированные коммуникации и унифицированный ввод-вывод. Cisco начала фазу унифицированных вычислений в рамках нашей стратегии унифицированного центра обработки данных несколько лет назад, собрав опытную команду из вычислительной индустрии и виртуализации, чтобы пополнить наш собственный опыт работы с сетями и доступом к хранилищам.В результате Cisco предоставила базовые технологии, включая семейство Cisco Nexus ® , поддерживающие унифицированную структуру и виртуализацию серверов. Cisco UCS завершает этот этап, предлагая инновации в архитектуре, технологиях, партнерских отношениях и услугах. Cisco имеет хорошие возможности для внедрения этой инновации, используя системный подход к вычислениям, который объединяет сетевой интеллект и масштабируемость с инновационными специализированными интегральными схемами, интегрированным управлением и стандартными вычислительными компонентами.
Cisco Capital
Гибкие платежные решения, которые помогут вам достичь ваших целей
Cisco Capital упрощает получение нужной технологии для достижения ваших целей, позволяет трансформировать бизнес и помогает вам оставаться конкурентоспособными.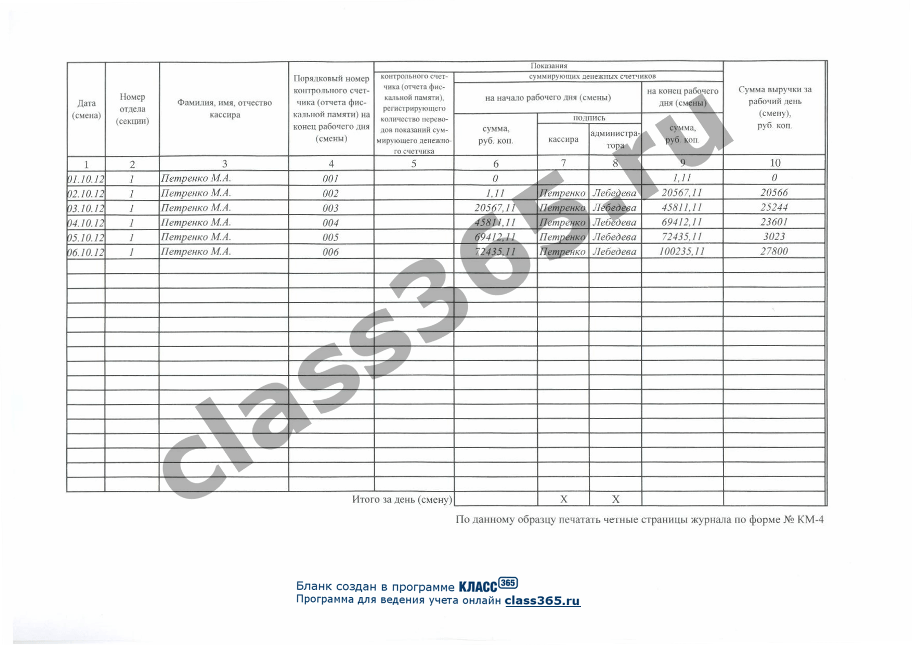 Мы можем помочь вам снизить общую стоимость владения, сохранить капитал и ускорить рост. В более чем 100 странах наши гибкие платежные решения могут помочь вам приобретать оборудование, программное обеспечение, услуги и дополнительное оборудование сторонних производителей с помощью простых и предсказуемых платежей. Учить больше.
Мы можем помочь вам снизить общую стоимость владения, сохранить капитал и ускорить рост. В более чем 100 странах наши гибкие платежные решения могут помочь вам приобретать оборудование, программное обеспечение, услуги и дополнительное оборудование сторонних производителей с помощью простых и предсказуемых платежей. Учить больше.
Для получения дополнительной информации
Для получения дополнительной информации о Cisco UCS посетите https://www.cisco.com/en/US/products/ps10265/index.html.
KM Control (размещенный контроль) в Unified Service Desk
- 8 минут на чтение
В этой статье
Примечание
Действует с ноября 2020 г .:
- Common Data Service переименована в Microsoft Dataverse.
 Узнать больше
Узнать больше - Обновлена некоторая терминология в Microsoft Dataverse. Например, объект теперь таблица , а поле теперь столбец . Узнать больше
Эта статья будет скоро обновлена с учетом последней терминологии.
Используйте размещенный элемент управления KM Control для отображения статей базы знаний в приложении агента. Используя новый размещенный элемент управления, ваши сервисные агенты могут искать статьи, связывать или отменять связь статьи с делом, копировать ссылку на статью и отправлять ее по электронной почте или в чате, не переключая приложения.Дополнительная информация: Используйте знания для эффективного взаимодействия с клиентами и настройте Unified Service Desk для использования приложений на основе моделей
Создание размещенного элемента управления KM Control
При создании нового размещенного элемента управления поля на экране Новый размещенный элемент управления различаются в зависимости от типа размещенного элемента управления, который вы хотите создать. В этом разделе представлена информация о конкретных полях, которые являются уникальными для типа размещенного элемента управления KM Control . Дополнительные сведения о создании размещенного элемента управления см. В разделе Создание или изменение размещенного элемента управления.
В этом разделе представлена информация о конкретных полях, которые являются уникальными для типа размещенного элемента управления KM Control . Дополнительные сведения о создании размещенного элемента управления см. В разделе Создание или изменение размещенного элемента управления.
На экране New Hosted Control :
В области Unified Service Desk выберите KM Control из раскрывающегося списка Unified Service Desk Component Type .
Раскрывающийся список Разрешить несколько страниц не поддерживается для этого типа размещенного элемента управления.
В раскрывающемся списке Hosting Type указывается, как вы хотите разместить этот элемент управления.Вы можете выбрать Chrome Process . Дополнительные сведения см. В разделе Выбор метода размещения размещенных элементов управления.
В области Общие свойства установите флажок Приложение является глобальным , чтобы установить размещенный элемент управления как глобальный. Глобальные размещенные элементы управления могут отображаться вне сеанса клиента. Такие элементы управления, как информационная панель, стена или поиск агентов, обычно используются для глобальных размещенных элементов управления. Глобальные размещенные элементы управления не имеют состояния, зависящего от сеанса, поэтому при изменении сеанса эти же глобальные размещенные элементы управления остаются.Если флажок не установлен, размещенный элемент управления будет основан на сеансе. Управление на основе сеанса существует в контексте сеанса клиента. Если пользователь переходит на другой сеанс, все страницы сеанса из предыдущего сеанса скрываются.
Поле Display Group отображает панель, на которой будет отображаться этот размещенный элемент управления. В пакете управления знаниями KM Control отображается в RightPanel ; однако вы можете выбрать отображение его на левой панели или MainPanel в соответствии с вашими требованиями.
 Для получения информации о различных панелях, доступных в Unified Service Desk, см. Панели, типы панелей и макеты панелей в Unified Service Desk.
Для получения информации о различных панелях, доступных в Unified Service Desk, см. Панели, типы панелей и макеты панелей в Unified Service Desk.Дополнительные сведения о других полях Общие см. В разделе Создание или изменение размещенного элемента управления.

Предопределенные действия UII
Это предопределенные действия для этого типа размещенного элемента управления.
Сотрудник
Связывает запись базы знаний в Microsoft Dataverse с записью родительского объекта в KM Control .
| Параметр | Описание |
|---|---|
| entitytypename | Логическое имя родительской сущности, с которой нужно связать запись базы знаний. Например: entitytypename = инцидент |
| идентификатор записи | Идентификатор записи родительской сущности, с которой нужно связать запись базы знаний. |
| артикулуникальный | Уникальный идентификатор статьи, которую вы хотите связать. Например: Например: articleuniqueid = 7924/8112 / Article / 41 |
| артикул | Строковое значение, представляющее заголовок статьи, которую вы хотите связать. Например: articletitle = Рассеянный солнечный свет и погодные условия |
| статьяpublicurl | Общедоступный URL-адрес статьи, которую вы хотите связать. Если вы используете собственную базу знаний Dataverse, статьи уже должны быть опубликованы на внешнем портале (выберите Использовать внешний портал в диалоговом окне Параметры управления базой знаний в Dataverse), чтобы вы могли использовать URL-адрес статьи в этот параметр. Например: |
Закрыть
Закрывает размещенный элемент управления KM Control .
Отказ от связи
Отсоединяет запись базы знаний, которая уже связана с записью родительской сущности в KM Control .
| Параметр | Описание |
|---|---|
артикулуникальный | Уникальный идентификатор статьи, от которой вы хотите отказаться.Например: articleuniqueid = 7924/8112 / Article / 41 |
relatedentityrecordid | Идентификатор записи родительской сущности, с которой связана запись базы знаний. |
имя объекта | Логическое имя родительской сущности, с которой связана запись базы знаний. Например: entitytypename = инцидент |
FireEvent
Запускает определяемое пользователем событие из размещенного элемента управления KM Control .
| Параметр | Описание |
|---|---|
название | Имя определяемого пользователем события. |
Все последующие пары имя = значение становятся параметрами события. Дополнительные сведения о создании пользовательского события см. В разделе Создание пользовательского события.
Дополнительные сведения о создании пользовательского события см. В разделе Создание пользовательского события.
MoveToPanel
Перемещает размещенный элемент управления на указанную панель в Unified Service Desk во время выполнения.
| Параметр | Описание |
|---|---|
приложение | Имя перемещаемого размещенного элемента управления. |
панель | Имя целевой панели, на которую нужно переместить размещенный элемент управления. |
Всплывающее окно
Выдвигает URL-адрес из размещенного элемента управления и запускает для него правила навигации по окнам, чтобы перенаправить всплывающее окно в соответствующее место.
| Параметр | Описание |
|---|---|
url | Направляет всплывающее окно из размещенного элемента управления, используя этот URL-адрес, как если бы это было всплывающее окно, запрошенное из отображаемого элемента управления. |
рама | Кадр, из которого возникло всплывающее окно. |
RealignWindow
Отображает размещенный элемент управления в указанном месте на мониторе. Вы можете отображать размещенный элемент управления максимум на двух мониторах. Это действие применимо для размещенных экземпляров элементов управления, которые настроены для размещения на типе панели USDFloatingPanel или USDFloatingToolPanel.
| Параметр | Описание |
|---|---|
| экран | Задает экран, на котором будет отображаться размещенный элемент управления.Допустимые значения: 1 или 2. Если вы не укажете этот параметр, по умолчанию будет передано 1. |
| слева | Задает позицию в процентах от левого края экрана на целевом мониторе, где должен отображаться размещенный элемент управления. Допустимые значения: от 0 до 100. Если вы не укажете этот параметр, по умолчанию будет передано 0. |
| верх | Задает позицию в процентах от верхнего края экрана на целевом мониторе, где должен отображаться размещенный элемент управления.Допустимые значения: от 0 до 100. Если вы не укажете этот параметр, по умолчанию будет передано 0. |
| ширина | Задает ширину в процентах размещенного окна управления на целевом мониторе. Допустимые значения: от 1 до 100. Если вы не укажете этот параметр, по умолчанию будет передано 100. |
| высота | Задает высоту в процентах размещенного окна управления на целевом мониторе. Допустимые значения: от 1 до 100. Если вы не укажете этот параметр, по умолчанию будет передано 100. |
Искать
Выполняет поиск записей в KM Control , передавая строку поиска в качестве параметра.
| Параметр | Описание |
|---|---|
| запрос | Строковое значение для поиска в размещенном элементе управления. Например: query = contoso . При этом будут извлечены все статьи базы знаний из приложений на основе модели, имена которых начинаются со слова «contoso». |
| результаты | Целочисленное значение, указывающее количество результатов поиска, отображаемых в размещенном элементе управления.Например, если указать результатов = 5 , в размещенном элементе управления отобразятся 5 результатов поиска. Если для этого параметра данных не указано значение или указано неверное значение, то будет использоваться значение по умолчанию (10). Максимальное допустимое значение для этого параметра данных — 20. |
| фильтр | Целочисленное значение, указывающее тип статьи базы знаний, которая будет отображаться в размещенном элементе управления: – Например, укажите Если значение не указано или указано неверное значение, будет использоваться значение по умолчанию (1). |
| блок Нажмите | Целочисленное значение, указывающее, следует ли блокировать отображение встроенного содержимого при щелчке результата поиска в размещенном элементе управления. Установите значение 0 , чтобы при щелчке открывать содержимое в строке; установите 1 , чтобы заблокировать открытие содержимого в строке. Например: заблокировано = 1 Если значение не указано или указано неверное значение, будет использоваться значение по умолчанию (0).Если вы установили значение 1 для блокировки содержимого, событие ResultOpen все равно будет запущено. |
| сорт | Целочисленное значение, указывающее параметры сортировки статей базы знаний в результатах поиска: — Например, укажите Если значение не указано или указано неверное значение, то для параметра данных будет использоваться значение по умолчанию (1). |
SetArticleContext
Добавляет данные к текущей статье базы знаний в KM Control .
| Параметр | Описание |
|---|---|
статьяприложение | Имя размещенного элемента управления, в котором будет отображаться статья базы знаний. |
статья | Значение объекта записи статьи, переданное из события ResultOpen. |
SetSearchProps
Включает различные типы фильтров для поиска статей базы знаний в KM Control .
| Параметр | Описание |
|---|---|
показатьФильтр | Указывает, следует ли включить фильтр по типу статьи для поиска статей в базе знаний.Установите 0 , чтобы скрыть фильтр, и 1 , чтобы отобразить фильтр. Например: showFilter = 1 .Если значение не указано или указано неверное значение, будет использоваться значение по умолчанию (0). |
показатьLang | Указывает, следует ли включить языковой фильтр для поиска статей базы знаний. Установите 0 , чтобы скрыть фильтр, и 1 , чтобы отобразить фильтр. Например: showLang = 1 .Если значение не указано или указано неверное значение, будет использоваться значение по умолчанию (0). |
показать Деп. | Указывает, следует ли включить фильтр отделов для поиска статей в базе знаний. Установите 0 , чтобы скрыть фильтр, и 1 , чтобы отобразить фильтр. Например: showDept = 1 .Если значение не указано или указано неверное значение, будет использоваться значение по умолчанию (0). |
Размер
Задает высоту и ширину размещенного элемента управления. Это особенно полезно при использовании «авто» в компоновках панелей.
| Параметр | Описание |
|---|---|
ширина | Ширина размещенного элемента управления. |
высота | Высота размещенного элемента управления. |
SetUserCanClose
Позволяет пользователю закрыть размещенный элемент управления, щелкнув значок X в правом верхнем углу вкладки размещенного элемента управления.
| Параметр | Описание |
|---|---|
UserCanClose | Установите значение true , чтобы пользователь мог закрыть размещенный элемент управления.В противном случае установите false . |
Предопределенные события
Следующие предопределенные события связаны с этим типом размещенного элемента управления.
PopupRouted
Происходит после того, как система перенаправила всплывающее окно.
| Параметр | Описание |
|---|---|
url | URL-адрес перенаправленного всплывающего окна. |
РезультатОткрыть
Происходит, когда результат поиска открывается для чтения содержимого в KM Control .
| Параметр | Описание |
|---|---|
постданные | Объект formdata, содержащий набор пар ключ / значение, представляющих поля формы и их значения для статьи базы знаний. |
SearchComplete
Происходит после завершения поиска статьи базы знаний и загрузки результатов поиска в размещенный элемент управления.
Изменить выбор
Происходит при выборе результата в KM Control .
| Параметр | Описание |
|---|---|
постданные | Объект formdata, содержащий набор пар ключ / значение, представляющих поля формы и их значения для статьи базы знаний. |
См. Также
Используйте знания для эффективного взаимодействия с клиентами
Настройте Unified Service Desk для использования приложений на основе модели
Пошаговое руководство 8: Использование базы знаний в приложении агента
Типы размещенных элементов управления, действия и ссылки на события
интеркалиброванных пассивных микроволновых продуктов дождя из унифицированного алгоритма микроволнового извлечения океана (UMORA) на JSTOR
АбстрактныйРЕФЕРАТ Унифицированный алгоритм микроволнового поиска в океане (UMORA) одновременно извлекает температуру поверхности моря, скорость приземного ветра, столбчатый водяной пар, столбчатую облачную воду и интенсивность дождя на поверхности от различных пассивных микроволновых радиометров, включая специальный датчик микроволнового тепловизора (SSM / I). ), Миссия по измерению тропических осадков (TRMM), микроволновая камера (TMI) и усовершенствованный микроволновый сканирующий радиометр для системы наблюдения Земли (AMSR-E).Компонент дождя в UMORA явно параметризует три физических процесса, управляющих пассивным извлечением микроволнового дождя: эффект заполнения луча, разделение облачности и дождевой воды и эффективную толщину слоя дождя. Показания дождя из предыдущей версии UMORA не совпадали между различными датчиками и были слишком высокими в тропиках. Эти проблемы были исправлены с помощью более реалистичных высот дождевых столбов и правильного моделирования эффектов насыщения и разрешения отпечатка в коррекции заполнения луча.Цель этой статьи — описать алгоритм дождя и его недавние улучшения, а также сравнить полученные UMORA данные с алгоритмом профилирования Годдарда (GPROF) и интенсивностью дождя в Глобальном проекте климатологии осадков (GPCP). В среднем, извлечение TMI из UMORA хорошо согласуется с GPROF; однако большие различия становятся очевидными, когда мгновенные извлечения сравниваются на попиксельной основе. Различия связаны с фундаментальными различиями алгоритмов. Например, UMORA обычно извлекает более высокое общее количество жидкой воды, но GPROF извлекает более высокую интенсивность поверхностного дождя для данного общего количества жидкой воды из-за различий в микрофизических допущениях.Сравнение извлечений UMORA SSM / I с GPCP показывает аналогичные пространственные закономерности, но GPCP имеет более высокие глобальные средние значения из-за большего количества осадков во внетропиках. UMORA и GPCP имеют аналогичные линейные тренды за период 1988–2005 гг. С аналогичными пространственными структурами.
Информация о журналеЖурнал прикладной метеорологии и климатологии (JAMC) публикует прикладные исследования по метеорологии и климатологии. Примеры метеорологических исследований включают такие темы, как изменение погоды, спутниковая метеорология, радиолокационная метеорология, процессы пограничного слоя, физическая метеорология, метеорология загрязнения воздуха (включая дисперсию и химические процессы), сельскохозяйственную и лесную метеорологию, горную метеорологию и прикладные численные метеорологические модели.Примеры климатологических исследований включают использование климатической информации для оценки воздействия, динамического и статистического масштабирования, применения и проверки сезонных климатических прогнозов, климатических рисков и уязвимости, разработки инструментов мониторинга климата, а также городского и местного климата.
Информация об издателеОснованное в 1919 году Американское метеорологическое общество (AMS) является ведущей национальной научной и профессиональной организацией, продвигающей и распространяющей информацию об атмосферных, океанических и гидрологических науках.В число наших более 13 000 членов входят ученые, исследователи, преподаватели, метеорологи, студенты, энтузиасты погоды и другие профессионалы в области погоды, воды и климата. AMS — это некоммерческая членская организация 501 (c) 3, штаб-квартира которой расположена в историческом доме Харрисона Грэя Отиса в районе Бикон-Хилл в Бостоне. У нас также есть офис в Вашингтоне, округ Колумбия, где мы проводим наши образовательные и политические программы. AMS стремится усилить невероятную работу, проводимую в государственном, частном и академическом секторах.Наше сообщество знает, что сотрудничество и обмен информацией имеют решающее значение для обеспечения того, чтобы общество извлекало выгоду из самых лучших и самых современных научных знаний и понимания.
Единое представление методов аппроксимации продуктовой формы для общих замкнутых сетей массового обслуживания
Аннотация
Для анализа общих замкнутых сетей массового обслуживания были предложены два основных приближенных метода, а именно метод агрегирования и метод Мари.Идея метода агрегирования заключается в замене подсистемы (подсети) на один сервер, эквивалентный потоку, с зависящими от нагрузки скоростями обслуживания. Параметры эквивалентного сервера получаются путем изолированного анализа подсистемы как замкнутой системы с различными популяциями. Идея метода Мари также состоит в том, чтобы заменить подсистему эквивалентной экспоненциальной станцией обслуживания с зависящей от нагрузки скоростью обслуживания. Однако в этом случае параметры эквивалентного сервера получаются путем изолированного анализа подсистемы в процессе поступления Пуассона, зависящего от нагрузки.Более того, в случае Мари процедура итеративная.
В этой статье мы даем общий и унифицированный взгляд на эти два метода. Вклады этой статьи следующие. Сначала мы покажем, что их общий принцип состоит в том, чтобы разделить сеть на набор подсистем, а затем определить эквивалентную сеть в форме продукта. С каждой подсистемой связана экспоненциальная станция, зависящая от нагрузки, в эквивалентной сети. Мы определяем набор правил, чтобы разделить любую общую закрытую сеть с различными функциями, такими как общее распределение времени обслуживания, ограничения пупуляции, конечные буферы, зависимая от состояния маршрутизация.Затем мы показываем, что метод агрегации и метод Мари — это два способа получения параметров эквивалентной сети, связанной с данным разделом. Наконец, мы проводим обсуждение, относящееся к сравнению двух методов с точки зрения их точности и вычислительной сложности.
Ключевые слова
Закрытые сети очередей
анализ производительности
декомпозиция
аппроксимация формы продукта
агрегация
метод Мари
Рекомендуемые статьи Цитирующие статьи (0)
Полный текстCopyright © 1993 Опубликовано ElsevierV.
Рекомендуемые статьи
Цитирование статей
Frontiers | Единый подход к моделированию движения робота-змеи, преодолевающего сложные трубопроводные конструкции
1. Введение
Несмотря на простую конфигурацию тела и отсутствие конечностей, биологические змеи перемещаются в самых разных средах, таких как песчаные и илистые места, на деревьях и в узких местах. Вдохновленные биологическими змеями, были разработаны роботы-змеи с простыми структурами, образованными из повторяющихся соединительных модулей, которые могут выполнять различные виды передвижения.Ожидается, что они будут использоваться в опасных ситуациях, таких как спасательные работы и проверки инфраструктуры, особенно когда пространства узкие и недоступные для людей, например, внутри труб. Управление роботами-змеями — сложная задача из-за их избыточности, и было проведено много исследований, чтобы преодолеть эту трудность. Были проведены исследования, которые применяют движение, наблюдаемое у биологических змей, такое как волнистость на плоскости (Hirose, 1987) и передвижение с использованием препятствий (Kano et al., 2018), в инженерный контроль робота-змеи.Не только движение, но и нервная система биологических змей используется в качестве генератора центральных паттернов (ЦПГ) (Crespi and Ijspeert, 2008; Wu and Ma, 2013; Sartoretti et al., 2019).
Также был изучен подход к управлению на основе моделей. Было разработано несколько методов управления, которые помогают сближению контрольных значений с эталонными значениями при моделировании взаимодействия с роботами-змеями и окружающей средой. Эти методы можно разделить на два подхода. Один рассматривает скольжение тела робота (Сайто и др., 2002; Мохаммади и др., 2015; Ariizumi et al., 2018), а другой рассматривает неголономные ограничения без скольжения (Matsuno and Sato, 2005; Tanaka et al., 2015; Nakajima et al., 2019). Эти методы имеют преимущества простых сред и, по существу, плоских поверхностей, но не подходят для сложных или неизвестных сред, поскольку сложно построить динамическую модель, включая взаимодействие с такими средами.
Для выполнения передвижения в таких сложных средах для моделирования были предложены различные конструкции всей формы робота для эффективного передвижения.Эти методы без моделирования полезны в сложных условиях, таких как узкие пространства и трубы, в которых робот создает несколько точек контакта по всей своей длине. Несколько походок, например, поперечной прокатки и ползания по трубе , были реализованы путем формулирования траектории углов суставов как функции походки и изменения нескольких параметров походки, которые обладают четкими физическими характеристиками (Tesch et al., 2009; Rollinson and Choset , 2016). Однако для сложных форм мишени для робота-змеи этот подход неосуществим, потому что трудно напрямую сформулировать целевые углы суставов.
Для реализации передвижения на основе более сложных целевых кривых были предложены методы проектирования походок путем подгонки конфигурации робота-змеи к целевой кривой, которая имеет вид непрерывной кривой (Yamada and Hirose, 2006, 2008; Andersson, 2008; Hatton and Choset, 2010; Liljebäck et al., 2014). Эти методы позволяют рассматривать конфигурации роботов-змей как непрерывные кривые, что упрощает создание сложных форм. Takemori et al. (2018a) расширили метод Ямады (Yamada and Hirose, 2006) и предложили метод, включающий построение целевой кривой путем соединения простых форм.Они использовали предложенный ими метод для разработки целевой формы, которая требовала от робота частичного подъема корпуса вокруг фланца на трубе и достижения движения по фланцу. Также совершались передвижения по пересеченной местности и подъем по лестницам (Takemori et al., 2018b).
Исследование робота-змеи, движущегося внутри трубы, приближается к конечной цели нашего исследования, заключающейся в том, чтобы иметь возможность выполнять осмотр труб с помощью роботов-змеев. Как показано на Рисунке 1A, вероятно, будет множество «препятствий», которые робот, движущийся внутри труб, должен будет преодолевать, включая соединения, изгибы, непрерывные и прерывистые изменения диаметра трубы, срезы и засоры.Некоторые из этих препятствий, такие как изгибы, соединения и постоянные изменения диаметра трубы, преодолеваются с помощью предыдущих методов (Kamegawa et al., 2011; Rollinson and Choset, 2016), тогда как было трудно справиться с прерывистыми изменениями диаметра, ножницы и засоры. Кроме того, в реальной трубопроводной системе робот может встречаться одно за другим с различными препятствиями. Поскольку предыдущие методы предназначены только для отдельного препятствия, необходимо множество различных методов для последовательного преодоления многих видов препятствий.Однако нецелесообразно плавно переключаться между разными методами управления в зависимости от препятствия.
Рисунок 1 . Концепция исследования. (A) Различные конструкции труб. (B) Конструкция робота-змеи. (C) Определение ψ ( с ).
Чтобы приблизиться на один шаг к конечной цели, мы обращаемся к обсуждению сложных трубных конструкций в этой статье. Мы предлагаем «унифицированный» метод, который позволяет роботу-змею справляться со всеми препятствиями на рисунке 1A, некоторые из которых еще не преодолены, а другие уже преодолены, просто изменяя целевую форму робота, частично в зависимости от на препятствии.Следовательно, мы можем реализовать управление движением, которое последовательно преодолевает различные препятствия, не переключаясь на другой метод. В этом методе робот-змея преодолевает препятствие, локально согласуясь с формой препятствия, продвигаясь вперед по трубе с перекатывающим движением. Этот метод усовершенствован за счет регулировки перекатывающего движения с учетом проскальзывания между роботом и трубой, чтобы сделать метод применимым к движению, которое включает две спирали с разными радиусами и шагами.Кроме того, этот метод создает новое движение для входа в трубу и выхода из нее. Все движения робота управляются дистанционно оператором с помощью простых входов. Мы также демонстрируем это унифицированное движение, которое применимо к сложным конструкциям труб, для проектирования целевых форм для соединений, изгибов, изменений диаметра трубы, срезания, засоров и движения наизнанку в качестве примеров его применения. Мы также проводим эксперименты с использованием этого единого движения.
Это исследование основано на Inazawa et al.(2020) и расширяет его, добавляя модель, которая учитывает проскальзывание между трубой и роботом, чтобы согласовывать изменение диаметра и перемещаться изнутри трубы наружу. Наконец, мы проводим эти эксперименты, чтобы проверить модель.
2. Предыдущие работы
В этом разделе подробно представлена предыдущая работа, упомянутая в разделе 1.
2.1. Аппроксимация непрерывной кривой
Методы расчета углов сочленения робота-змеи для аппроксимации непрерывной кривой были предложены Ямада и Хиросе (2006, 2008), Андерссон (2008), Хаттон и Чосет (2010) и Лильебек и др.(2014). Андерссон (2008) предложил метод подгонки каждого сустава к целевой кривой от головы до хвоста для шарнирного робота с универсальными шарнирами. Хаттон и Чосет (2010) предложили отожженной цепи, фитинг , в котором аппроксимация проводилась от головки путем минимизации функции стоимости относительно расстояния между каждым соединением и целевой кривой. Liljebäck et al. (2014) предложили метод подгонки к непрерывной кривой, полученной путем соединения точек в трехмерном пространстве. Ямада и Хиросе (2008) смоделировали целевую кривую для робота-змеи (Ямада и Хиросе, 2006) и предложили метод получения целевого угла для каждого сустава по кривизне и кручению кривой (Ямада и Хиросе, 2008).
Этот метод Ямады может быть применен к роботу с любой совместной конфигурацией и является недорогим в вычислительном отношении. Были предложены различные походки с использованием этого метода (Kamegawa et al., 2009, 2011; Baba et al., 2010; Zhen et al., 2015; Zhou et al., 2017; Qi et al., 2018; Yaqub et al. , 2019). Kamegawa et al. спроектировал винтовую форму мишени и предложил винтовой прокатки для перемещения по трубе (Kamegawa et al., 2009; Baba et al., 2010). Они также предложили спиральное движение распространения волны (Qi et al., 2018) для согласования ответвления на трубе. Посылая форму волны вниз по спирали, это движение обеспечивает движение в тангенциальном направлении спирали, которое не может быть реализовано при качении. Zhen et al. (2015) разработали кривую, налагающую горб на дугу, и предложили перекатывающийся горб , который позволяет преодолевать препятствия с помощью перекатывающегося движения. Чжоу и др. (2017) разработали форму мишени, включающую две спирали и соединительную кривую; Расширяясь и сжимаясь, как пружина, робот совершал движение вне трубы с изменяющимся диаметром.Yaqub et al. (2019) разработали спиральную кривую с постепенно изменяющимся диаметром, которая позволяет роботу-змею перемещаться за пределы трубы с прерывистым изменением диаметра.
Когда целевая кривая становится более сложной, становится трудно выразить пространственную кривую аналитически. Кроме того, целевой угол сустава не может быть рассчитан с помощью метода Ямады (Yamada and Hirose, 2008), когда кручение в точке расходится, поскольку кривизна равна нулю (Yamada and Hirose, 2006). Чтобы решить эти проблемы, Takemori et al.(2018a) расширили метод Ямады (Yamada and Hirose, 2006) и предложили метод построения целевой кривой путем соединения простых форм, таких как прямые линии, дуги окружности и спирали. Этот метод обеспечивает интуитивно понятный дизайн соединения фигур со знакомыми свойствами. Кроме того, нет необходимости вычислять кривизну или кручение кривой, которая уже известна.
2.2. Движение внутри сложной трубы
Rollinson и Choset (2016) предложили метод контроля соответствия, в котором текущая форма робота может быть оценена по углам суставов с использованием расширенного фильтра Калмана на основе параметров походки.Это сделало возможным полуавтономную адаптацию к изменяющейся среде и перемещению внутри труб, имеющих изгибы, соединения и постоянные изменения диаметра. Считается, что этот метод трудно применить к большим и прерывистым изменениям диаметра, потому что вся часть робота наматывается вокруг трубы. Kamegawa et al. (2011) разработали целевую форму, соединив спиральную кривую изгиба (Kamegawa et al., 2011) со спиралью и реализовали движение внутри трубы с изгибом. Прежде чем эти методы можно будет применить к ножницам и блокировкам, требующим некоторого улучшения, робот должен тщательно преодолевать препятствия.
3. Дизайн походки и метод подгонки
3.1. Подгонка формы с использованием опорной кривой
Робот-змея в этом исследовании состоит из чередующихся соединенных шарниров оси тангажа и оси рыскания, как показано на Рисунке 1B. Длина звена составляет l , а относительный угол i -го шарнира составляет θ i .
Для начала мы объясним метод приближения, с помощью которого мы настраиваем робота-змею на целевую форму (Ямада и Хиросе, 2008).Начнем с представления пространственной кривой на основе кривизны и кручения. Рассмотрим каркас Френе – Серре , который является ортонормированным базисом ( e 1 ( s ), e 2 ( s ),
02 e ) 3 ( s )), который зависит от единственного параметра s , связанного с длиной вдоль кривой. Кроме того, e 1 ( s ) — вектор, касательный к кривой, e 2 ( s ) — вектор внутрь, нормальный к кривой, а e 3 ( s ) определяется как e 1 ( s ) × e 2 ( s ).То есть рама зависит от формы кривой. Кроме того, нам необходимо учитывать систему координат, которая обеспечивает ориентацию робота-змеи. Мы устанавливаем опорную рамку ( e r ( s ), e p ( s ),2 e ( с )) на кривой. e r ( s ) совпадает с вектором e 1 ( s ), тогда как e p 947 и e y ( s ) — векторы в направлении оси тангажа и оси рыскания соответственно.+ ψ0, (1) , где ψ 0 — произвольная постоянная интегрирования, соответствующая начальному значению угла закрутки. Изменение ψ 0 вращает опорную систему координат по кривой и генерирует перекатывающее движение . Кривизна вокруг оси тангажа и оси рыскания, обозначенная κ p ( s ) и κ y ( s ), соответственно, выражается через кривизну κ ( s ) и ψ ( с ) следующим образом: Наконец, мы получаем целевой угол каждого сустава как , где s h — положение головы робота-змеи на целевой кривой. Робот плавно трансформируется с помощью управления переключением , при котором изменение s h сдвигает диапазон, соответствующий телу робота в пределах целевой кривой. Далее мы объясним метод представления целевой формы в виде связанных простых форм, кривизна и скручивание которых постоянны, например, прямые линии, дуги окружности и спирали (Takemori et al., 2018а). Этот метод расширяет метод Ямады (Yamada and Hirose, 2008), чтобы обратиться к фреймам Френе-Серре, которые прерываются в соединительных частях , где простые формы объединяются. Связанная простая форма называется сегментом , а j -й сегмент называется сегментом — j ( j ∈ ℤ). Соединительная часть между сегментом- j и сегментом- ( j + 1) называется соединительной частью — j в точке s = s j .Бесконечно малые точки до и после соединительной части j обозначаются s j — и s j + соответственно. Кривизна и скручивание сегмента j представлены как κ j и τ j , соответственно. Используя κ j и τ j , кривизну κ ( с ) и кручение τ ( с ) целевой кривой при с j −1 < с ≤ с j , что эквивалентно точке на сегменте- j внутри соединенных сегментов, определяется как 3.2. Магистральная кривая, соединяющая простые формы
В этом исследовании мы используем прямые линии, дуги окружности и спирали в качестве сегментов. Для прямой не может быть определена система Френе – Серре и кручение; в этом случае мы определяем кручение как 0. Дуга имеет постоянную кривизну и нулевое кручение и определяется своим радиусом r j и центральным углом ϕ j .Спираль имеет кривизну и кручение, которые не равны нулю и постоянны, и определяется ее радиусом a j , b j и центральным углом ϕ j . Здесь b j = p j / 2π выполняется, где p j — шаг спирали. Назовем угол между касательной к спирали и плоскостью, перпендикулярной оси спирали, угол упреждения , выраженный как α = arctan ( p j / 2π r j ).На спирали e 2 ( s ) — это вектор, направленный вертикально от спирали к оси спирали.
3.3. Ограничения формы
Мы рассматриваем ограничения формы для целевой формы, возникающие в результате ограничений, накладываемых на углы сочленения. Максимальный угол изгиба соединения представлен как θ max . Поскольку трудно учесть ограничения во всех состояниях, здесь мы рассматриваем только случаи, когда диапазон интегрирования в (3) включает отдельно только дугу окружности и только спираль.
Во-первых, пусть κ c обозначает кривизну дуги окружности. Из (3) условие, ограничивающее целевой угол сочленения, равно
. | θid | = {| ∫sh− (i + 1) lsh− (i − 1) l − κ (s) sinψ (s) ds | (i: odd) | ∫sh− (i + 1) lsh− ( i − 1) lκ (s) cos ψ (s) ds | (i: четное) ≤∫ − llκcds = 2lκc≤θmax. (6)Во втором случае кривизна и кручение спирали обозначены κ h и τ h соответственно. Подставляя их в (5), ψ ( с ) представляется как
ψ (s) = τhs + ψ0.(7)Подставляя это в (2), уравнение представляется как
κp (s) = — κhsin (τhs + ψ0), κy (s) = κhcos (τhs + ψ0). (8)Подставляя их в (3), условие, ограничивающее целевой угол сустава, выражается как
| θid | = {| ∫sh− (i + 1) lsh− (i − 1) l − κh sin (τhs + ψ0) ds | (i: odd) | ∫sh− (i + 1) lsh− (i −1) lκh cos (τhs + ψ0) ds | (i: четное) ≤max [| ∫ − llκh sin (τhs¯ + x) ds¯ | (0≤x <2π)] = max [2 | κhτh sin ( τhl) sin (x) | (0≤x <2π)] ≤2 | κhτh sin (τhl) | ≤θmax, (9)где
s̄ = s- (ш-ил), (10) х = τh (sh-il) + ψ0.(11)4. Моушн-дизайн
Теперь обсудим целевую форму предлагаемого движения. Как показано на фиг. 2A, целевая форма состоит из двух спиралей на прямых трубках, называемых головной обмоткой рядом с головкой и хвостовой обмоткой около хвостовой части; ось для каждой намоточной части, называемая осью головки и осью хвостовой части ; направляющую часть от каждой намоточной части к ее соответствующей оси, называемую направляющей частью головки и направляющей частью хвоста ; и часть уклонения , которая соединяет две направляющие части и уклоняется от препятствий.Эта часть уклонения от препятствий позволяет роботу адаптироваться к различным препятствиям. Робот преодолевает препятствие при переключении передач, перемещая все свое тело от хвостовой части к головной части.
Рисунок 2. (A) Конфигурация целевой формы для робота-змеи, перемещающегося по трубе. (B) Сравнение моделей с направляющими частями и без них. Черные пунктирные эллипсы представляют собой концы уклоняющейся части.
Мы упоминаем цель направления каждого конца уклоняющейся части от намоточной части к ее оси.Во-первых, рассмотрим случай, когда каждый конец уклоняющейся части (черный пунктирный эллипс) не находится на оси трубы, как показано на левой панели рисунка 2B. Хотя это подробно обсуждается в разделе 4.2.1, здесь мы отмечаем, что каждая часть намотки вращается вокруг своей оси в соответствии с командами от элемента управления переключением, и относительное положение двух конечных точек части уклонения изменяется. Трудно адекватно деформировать уклоняющуюся часть (синяя линия) в ответ на это изменение относительного положения двух конечных точек.Чтобы решить эту проблему, мы конструируем направляющие части, которые направляют каждый конец уклоняющейся части (черный пунктирный эллипс) на каждую ось. Хотя каждая направляющая часть вращается вокруг своей оси, относительное положение двух концов уклоняющейся части больше не изменяется, как показано на правой панели рисунка 2В. Таким образом, уклоняющаяся часть (синяя линия) легко адаптируется к препятствию, не деформируясь.
Заводная и направляющая части сконструированы независимо от препятствия, тогда как уклоняющаяся часть предназначена для него.В следующих разделах мы обсудим дизайн формы и движение, чтобы реализовать движение, описанное выше.
4.1. Дизайн формы
Обсуждаем дизайн общих частей вне зависимости от препятствий. Параметры для этих частей показаны в таблице 1. Мы продолжаем описывать каждую из этих частей.
Таблица 1 . Параметры, описывающие сегменты, составляющие форму для согласования канала.
4.1.1. Обмотка часть
Радиус хвостовой обмотки t r w определяется как ( t d труба /2) — r звено , где t d труба — это внутренний диаметр трубы на задней стороне, а r звено — радиус звена робота-змеи.Шаг хвостовой обмотки t p w разработан вместе с направляющей хвостовой частью, к которой мы перейдем дальше. Часть обмотки хвоста должна быть достаточно длинной, чтобы покрывать все тело робота. Используя уравнение для получения длины спирали, определяется, что центральный угол хвостовой части обмотки t β w удовлетворяет требованиям
lrobot≤l1 = βtwrtw2 + (ptw2π) 2, (12), где l robot — общая длина змеи-робота.Радиус, шаг и центральный угол головной обмотки обозначены как h r w , h p w и h β w , соответственно, и определяется так же, как и часть обмотки хвоста.
4.1.2. Направляющая часть
На рис. 3А показана сегментная конфигурация направляющих частей. В таблице 1 n d — это количество сегментов, составляющих часть уклонения.Головная и хвостовая направляющие имеют схожие формы и параметры в зависимости от головной и хвостовой обмоток соответственно. По этой причине мы обрабатываем только направляющую часть хвоста, форма которой определяется t p w , радиусом сегмента-2 t r в и радиусом сегмента-4. r c .
Рисунок 3. (A) Конфигурация сегментов направляющих частей. (B) Схема хвостовой направляющей на плоскости xy . (C) Схема направляющей части хвоста на плоскости xz .
Проекция направляющей части хвоста на плоскость xy в абсолютной системе координат O — xyz , где ось z эквивалентна оси трубы, показана на рисунке 3B. Точки P, Q, R, O w в верхней части рисунка являются соединительными частями и имеют соответствующие точки в нижней части рисунка. O w представляет собой центральную точку серого круга на рисунке 3B, который является проекцией сегмента-1 на плоскость xy .Сегмент-2 представляет собой спираль, которая изменяет направление целевой кривой по направлению к оси хвоста. Ось сегмента-2 спроектирована так, чтобы быть параллельной оси хвоста, чтобы упростить геометрический расчет путем превращения всех спиралей в окружность и дугу на плоскости xy , как на рисунке 3B. O в представляет собой центральную точку красной дуги окружности на рисунке 3B, которая является проекцией сегмента-2 на плоскость xy .
Для реализации этой конфигурации сегмента t p в и t β в и t l s определяются после следующего расчета.Поскольку сегмент-1 и сегмент-2 соединены непрерывно, угол между плоскостью xy и целевой кривой в соединительной части-1 равен углу подъема сегмента-1. Если угол подъема сегмента-2 равен углу подъема сегмента-1, ось сегмента-2 перпендикулярна плоскости xy и параллельна оси сегмента-1. Чтобы оси сегмента-2 и хвостовой части обмотки были параллельны друг другу, угол упора t α должен удовлетворять
αt = arctanptw2πrtw = arctanptin2πrtin.(13)Тогда получаем t p в как
ptin = rtinrtwptw. (14)Проекция направляющей части хвоста на плоскость xz также показана на рисунке 3C. Точки P, Q, R, O w в верхней части рисунка являются соединительными частями и имеют соответствующие точки в нижней части рисунка. O c представляет собой центральную точку зеленой дуги окружности на рисунке 3C, которая является проекцией сегмента-4 на плоскость xz . t β в выводится геометрическим соотношением, показанным на рисунке 3B как
. βtin = ∠OinQOw + ∠OinOwQ = π2 + arcsinrtinrtw − rtin. (15)Чтобы получить t l s , мы сначала выводим O w R и RQ на рисунке 3B по геометрической зависимости, показанной на рисунке 3C как
. RQ = tlscostα, (16) OwR = rc {1-cos (π2-tα)}. (17)Тогда t l s определяется формулами (16), (17), а геометрическая зависимость, показанная на рисунке 3B, равна
. lts = RQcostα = OwQ − OwRcostα = (rtw — rtin) 2 — rtin2 − rc {1 − cos (π2 — αt)} costα.(18)Обратите внимание, что t p w и t r в должны быть определены при удовлетворении t l s ≥ 0 для этой конфигурации сегмента. Кроме того, также должны быть выполнены ограничения формы, описанные в разделе 3.3.
Мы вводим параметр ϕ , смещение , который настраивается оператором и используется для регулировки направления уклоняющейся части в соответствии с формой трубы.
4.1.3. Уклонение от части
Уклоняющаяся часть может быть спроектирована для конкретной конструкции трубы. В разделе 5 приведены примеры, относящиеся к стыку, изгибу, сдвигу, закупорке и изменению диаметра трубы.
4.2. Порядок передвижения
Далее мы объясним движение для предложенного движения. На рисунке 4 показаны процедурные этапы преодоления препятствия. Здесь мы используем целевую форму для соединения, представленную в разделе 5. Четыре шага на Рисунке 4 описаны следующим образом:
1.Шаг 1: Подойдите к препятствию, используя перекатывающее движение (угол переката).
2. Шаг 2: Сдвиньте положение головы на часть уклонения под контролем сдвига (длина сдвига).
3. Шаг 3: Отрегулируйте положение уклоняющейся части в осевом направлении с помощью перекатывающего движения и направления, используя смещение ϕ (угол качения и смещение ϕ ).
4. Шаг 4: Преодолеть препятствие под контролем смены (продолжительность смены).
Рисунок 4 .Процедура задействована в движении.
Здесь оператор указывает значение в скобках на каждом шаге. Оператор может распознать часть уклонения с помощью шага 2 и отрегулировать ее положение и направление с помощью шага 3. Соответствующее положение и направление части уклонения на шаге 3 различны для каждого препятствия, как описано в разделе 5.
4.2.1. Фиксация уклонения Деталь
Положение уклоняющейся части должно быть привязано к окружающей среде, пока робот движется по трубе, не сталкиваясь с трубой на шаге 4.На следующих рисунках показаны примеры соединений. Здесь предполагается отсутствие проскальзывания между роботом и трубой.
Сначала рассмотрим смещение в осевом направлении. Как показано на левой панели фиг. 5A, простое выполнение управления переключением приводит к разрушению целевой формы из-за смещения уклоняющейся части в осевом направлении. Следовательно, это смещение, вызванное переключением передач, отменяется перекатывающим движением, как показано на правой панели рисунка 5A.С этой целью, как показано на рисунке 5B, скорость прокатки в соединительной части-1 ψ ∙ troll определяется скоростью рычага переключения передач ṡ ч ,
ψ˙troll = −s˙hsintαktaxis, (19), где t k ось — смещение в осевом направлении на единицу угла качения.
Рисунок 5 . Исправление уклоняющейся части. (A) Управление переключением, выполняющее перекатывающееся движение. (B) Смещение оси хвоста на соединении-части-1.4 в Таблице 1, изменено так, чтобы отменить вращение уклоняющейся части (см. Рисунок 5D). Для этой цели, как показано на рисунке 5E, ϕ ∙ trot, производная по времени t ϕ rot определяется с использованием ṡ h и ψ ∙ troll по
. ϕ˙trot = −ktrotψ˙troll + 2s˙hcostαdtpipe, (20), где t k rot — угол поворота вокруг оси хвоста на единицу угла качения. t k оси и t k rot зависят от параметров хвостовой обмотки.Эти значения трудно получить аналитически из-за ошибки подгонки робота и проскальзывания между роботом и трубой. Следовательно, они фактически измеряются в экспериментах, в которых выполняется только качение.
4.2.2. Деривация для фиксации уклонения Деталь
Мы выводим соответствующее значение ψ ∙ 0, производной по времени от начального угла поворота ψ 0 , чтобы реализовать ψ ∙ troll и ψ ∙ hroll в предыдущем разделе.
Точка a от головы робота находится на расстоянии с r = с h — a (0 ≤ a ≤ l робот ) на целевой кривой.jδ (sh-a-sj) s ∙ h, (22)
где δ — импульсная функция. Импульсная функция имеет нулевое значение, за исключением соединительной части, где с h — a — с j = 0. С другой стороны, импульсная функция имеет ненулевое значение при соединительная часть. Однако это не влияет на общее движение робота, потому что длина соединительной части равна нулю. Следовательно, последний член в правой части пренебрежимо мал.Точки на хвостовой обмотке и на головной обмотке целевой кривой представлены как sr = sh-ta и sr = sh-ha, соответственно. Для реализации ψ ∙ (ш-та) = tψ ∙ накат на хвостовой части обмотки и ψ ∙ (ш-га) = hψ ∙ накат на головной обмотке, требуемые значения ψ ∙ 0 на хвостовой части обмотки и на головная обмотка —
ψ˙troll = ψ˙0 + τtws˙h, (23) ψ˙hroll = ψ˙0 + τhws˙h + ϕ˙trot − ϕ˙hrot, (24)где t τ w и h τ w обозначают кручения хвостовой и головной частей обмотки соответственно.
Когда обе эти части обмотки имеют одинаковый радиус, ψ ∙ troll = ϕ ∙ hroll, t τ w = h τ w , и ϕ ∙ trot = ϕ ∙ hrot. Следовательно, (23) и (24) выполняются одновременно. Это означает, что фиксация уклоняющейся части может быть реализована жестко без проскальзывания между роботом и трубой, что зависит от условий трения и модели.
Однако, когда обе части обмотки имеют разные радиусы, ψ ∙ troll ≠ ψ ∙ hroll, t τ w ≠ h τ w и ϕ ∙ trot ≠ ϕ ∙ hrot.Следовательно, не существует ψ ∙ 0, удовлетворяющего (23) и (24) одновременно. При любом значении ψ ∙ 0 проскальзывание происходит между роботом и трубой на одной или обеих частях головной и хвостовой намотки. Это проскальзывание возможно для предотвращения фиксации уклоняющейся части, которая основана на предположении отсутствия проскальзывания. Следовательно, для фиксации уклоняющейся части требуется модель, включающая прорезь между роботом и трубой.
4.2.3. Модель с прорезью между роботом и трубой
Далее мы рассматриваем модель, которая включает проскальзывание между роботом и трубой, и стремимся вывести взаимосвязь между скоростью сдвига, ψ ∙ 0, и ϕ ∙ diff, чтобы зафиксировать уклоняющуюся часть на трубе, где
ϕ ∙ diff = tϕ ∙ rot-hϕ ∙ rot + ωslip.(25)Здесь ω slip — это сумма угловой скорости скольжения вокруг оси на хвостовой и головной частях обмотки.
Предположим, что между роботом и трубой существует вязкое трение, как в Saito et al. (2002), Liljebäck et al. (2010), Ариидзуми и Мацуно (2017) и Ариизуми и др. (2018). Предполагается, что трение пропорционально нормальной силе со стороны трубы, как в работах Хикса и Ито (2005) и Ариидзуми и Мацуно (2017). Считается, что нормальная сила действует одинаково вдоль тела робота и представлена как T = ρ l cont , что пропорционально длине контакта l cont .ρ — коэффициент давления на единицу длины контакта. Здесь равновесие сил в осевом направлении представлено как
μtvslipρtlw + μhvslipρhlw = 0, (26), где μ — коэффициент трения, и t v slip и h v slip — скорости скольжения в осевом направлении на хвостовой и головной частях обмотки соответственно. Кроме того, t l w и h l w — это соответственно длины хвостовой и головной частей обмотки в пределах диапазона, соответствующего телу робота на целевой кривой.Далее мы рассмотрим скорость уклоняющейся части от трубы. Чтобы зафиксировать отклоняющуюся часть от трубы, мы учитываем скорость, возникающую при управлении сдвигом, качением и скольжением, и делаем ее значение равным нулю. Поскольку целевая форма соединена непрерывно, два конца уклоняющейся части имеют одинаковую скорость относительно трубы v dod . Наша цель — сделать v dod нулем.
4.2.3.1. Изменение диаметра трубы
В случае изменения диаметра скорость уклоняющейся части в осевом направлении, как показано на рисунке 6A, представлена как
vdod = −ktaxisψ˙troll − s˙hsintα + vtslip = −khaxisψ˙hroll − s˙hsinhα + vhslip.(27)Используя (23), (24) и (26), (27) переписывается как
vdod = −ktaxisψ˙0− (ktaxisτtw + sintα) s˙h + vtslip (28) = −khaxisψ˙0− (khaxisτhw + sinhα) s˙h − ltwlhwvtslip −khaxisϕ˙diff. (29)Кроме того, ϕ ∙ diff выражается через ψ ∙ 0, ṡ h , и ω скольжение путем подстановки (20) в (25) как
ϕ ∙ diff = Aψ ∙ 0 + Bs ∙ h + ωslip, (30)где
A = −ktrot − khrot1 − khrot, B = −ktrotτtw + 2 costαdtpipe + khrotτhw − 2 coshαdhpipe1 − khrot. (31)В итоге, подставив (30) в (29), (27) выражается как
vdod = −ktaxisψ˙0− (ktaxisτtw + sintα) s˙h + vtslip (32) = −khaxis (1 + A) ψ˙0− {khaxis (τhw + B) + sinhα} s˙h −ltwlhwvtslip − khaxisωslip.(33)Как упоминалось ранее, наша цель — получить ψ ∙ 0 и ϕ ∙ diff как функции входного значения на шаге 4 ṡ h , чтобы реализовать фиксацию уклоняющейся части, то есть v dod = 0 . В дополнение к трем уравнениям (30), (32) и (33) необходимо еще одно уравнение для обозначения четырех переменных: ψ ∙ 0, ϕ ∙ diff, t v slip и ω скольжение . Введем управление балансом между скольжением в осевом направлении t v скольжением и скольжением вокруг оси ω скольжением в качестве другого уравнения.Существует компромиссное соотношение между скольжением t v и скольжением , которое не может быть равно нулю одновременно в случае различных радиусов головной и хвостовой частей обмотки. Здесь мы имеем дело с двумя крайними случаями: (A) движение, при котором скольжение не происходит вокруг оси, но скольжение происходит в осевом направлении ( t v скольжение ≠ 0, ω скольжение = 0) и (B) движение, при котором скольжение не происходит в осевом направлении, но происходит скольжение вокруг оси ( t v скольжение = 0, ω скольжение ≠ 0).В (A) скольжение в осевом направлении t d труба должно быть получено на основе модели скольжения для фиксации уклоняющейся части, в то время как скольжение вокруг оси скольжение определено как нулевое. В (B) скольжение вокруг оси ω slip должно быть получено на основе модели скольжения для фиксации уклоняющейся части, тогда как скольжение в осевом направлении t v скольжение определено как нулевое.
Рисунок 6.(A) Скорость уклоняющейся части в осевом направлении в случае изменения диаметра. (B) Скорость уклоняющейся части в осевом направлении в случае движения наизнанку-наружу. (C) ψ ∙ 0 для движения наизнанку, полученного по (42).
(A) Отсутствие скольжения вокруг оси, но скольжение в осевом направлении:
Сначала мы обсудим движение без скольжения вокруг оси, а скольжение в осевом направлении ( t v скольжение ≠ 0, ω скольжение = 0).Поскольку положение уклоняющейся части в осевом направлении предназначено для фиксации в зависимости от скольжения в осевом направлении t v скольжение , положение можно переместить, если есть ошибка моделирования скольжения в осевом направлении. С другой стороны, направление уклоняющейся части может быть зафиксировано точно, потому что нет скольжения вокруг оси. Таким образом, это движение подходит для обхода препятствия, для которого направление уклоняющейся части должно быть точно зафиксировано.В этом движении из (32), (33) и ω скольжения = 0 скорость уклоняющейся части представлена как
vdod = −Ftltw − Fhlhwltw + lhwψ˙0 − Gtltw − Ghlhw (1 − khrot) (ltw + lhw) s˙h. (34)где
Ft = ktaxis, Fh = 1 − ktrot1 − khrotkhaxis, Gt = ktaxisτtw + sintα, Gh = khaxis1 − khrot (−ktrotτtw + 2 costαdtpipe + hτw − 2 coshαdhpipe) + sinhα. (35)Следовательно, ψ ∙ 0 для фиксации уклоняющейся части в осевом направлении, т.е. для реализации v dod = 0, получается
ψ˙0 = −Gtltw + GhlhwFtltw + Fhlhws˙h.(36)Тогда ϕ ∙ diff вычисляется путем подстановки ω скольжения = 0 и (36) в (30) как
ϕ˙diff = Aψ˙0 + Bs˙h, = (- Gtltw + GhlhwFtltw + FhlhwA + B) s˙h. (37)(B) Отсутствие скольжения в осевом направлении, но скольжение вокруг оси:
Далее, рассмотрим движение без скольжения в осевом направлении, но со скольжением вокруг оси ( t v скольжение = 0, ω скольжение ≠ 0). Поскольку направление уклоняющейся части спроектировано так, чтобы фиксироваться в зависимости от скольжения вокруг оси скольжения , направление можно перемещать, если имеется ошибка моделирования скольжения вокруг оси.С другой стороны, положение уклоняющейся части в осевом направлении можно точно фиксировать, поскольку в осевом направлении нет скольжения. Следовательно, это движение эффективно, когда положение уклоняющейся части в осевом направлении должно поддерживаться в первую очередь, например, изменение диаметра, целевая форма которого является осесимметричной, как описано ниже. Используя (28), (29) и t v скольжение = 0, ψ ∙ 0 и ω скольжение для фиксации уклоняющейся части получается
ψ˙0 = — (τtw + sintαktaxis) s˙h, (38) ϕ˙diff = (τtw + sintαktaxis − τhw − sinhαkhaxis) s˙h.(39)Обратите внимание, что эти два движения (A) и (B) равны друг другу в соединении, изгибе, сдвиге и блокировке, которые можно преодолевать без скольжения в осевом направлении и вокруг оси. Для этих случаев t v slip и ϕ ∙ diff становятся равными нулю, и получается тот же результат, что и в разделе 4.2.1.
4.2.3.2. Движение между внутренним и внешним
Далее мы рассмотрим случай движения наизнанку. Как и в случае изменения диаметра, равновесие сил в осевом направлении описывается как (26).Тогда скорость двух концов уклоняющейся части, как показано на рисунке 6B, будет представлена как
. vdod = −ktaxisψ˙troll − s˙hsintα + vtslip = khaxisψ˙hroll + s˙hsinhα + vhslip. (40)(A) Отсутствие скольжения вокруг оси, но скольжение в осевом направлении:
Начнем, как и раньше, с движения без скольжения вокруг оси, а скольжения в осевом направлении ( t v скольжение ≠ 0, ω скольжение = 0). Из (26), (40) и ω скольжения = 0 скорость уклоняющейся части представлена как
vdod = −Ftltw − Fhlhwltw + lhwψ˙0 − Gtltw − Ghlhwltw + lhws˙h.(41)Следовательно, ψ ∙ 0 и ϕ ∙ diff для реализации v dod = 0 получается с помощью
ψ˙0 = −Gtltw − GhlhwFtltw − Fhlhws˙h, (42) ϕ˙diff = (- Gtltw − GhlhwFtltw − FhlhwA + B) s˙h. (43)Здесь ψ ∙ 0 расходится, когда знаменатель t F t l w — h F h l w становится равным нулю, как показано на рисунке 6С. Поэтому мы вводим ограничения -ψ ∙ 0, lim и ψ ∙ 0, lim для ψ ∙ 0, чтобы не требовать быстрого изменения угла шарнира, которое исполнительный механизм не может реализовать.Следует учитывать влияние этого ограничения. Поскольку v dod является линейной функцией ψ ∙ 0, знак v dod определяется коэффициентом ψ ∙ 0 и тем, больше или меньше ψ ∙ 0, чем ψ ∙ 0, чтобы реализовать v dod = 0 (42). До расхождения t F t l w — h F h l w положительный, а коэффициент ψ ∙ 0 в (41) становится положительным. .Здесь t l w + h l w > 0 удовлетворяет, потому что t l w и h l w длины ветров части в пределах диапазона приближения робота. -ψ ∙ 0, lim меньше, чем ψ ∙ 0, полученное с помощью (42), как показано на рисунке 6C. После расхождения t F t l w — h F h l w отрицательный, коэффициент ψ ∙ 0 в (41) становится отрицательным. .ψ ∙ 0, lim больше, чем ψ ∙ 0, полученное с помощью (42), как показано на рисунке 6C. Следовательно, v dod становится отрицательным, в то время как ограничение накладывается на ψ ∙ 0. Это v dod <0 указывает, что и головная, и хвостовая части намотки перемещаются в сторону трубы до тех пор, пока сегмент-5 не соприкоснется с кромкой трубы. Это явление фиксирует только уклоняющуюся часть и не мешает общим движениям, таким как падение робота из трубы.
(B) Отсутствие скольжения в осевом направлении, но скольжение вокруг оси:
Далее рассмотрим движение без проскальзывания в осевом направлении, но со скольжением вокруг оси ( t v скольжение = 0, ω скольжение ≠ 0).Это движение также подходит для движения наизнанку наружу, поскольку его целевая форма является осесимметричной, как описано ниже, и смещение уклоняющейся части в осевом направлении должно поддерживаться более подходящим образом, чем вращение уклоняющейся части вокруг оси. . Используя (40), ψ ∙ 0 и ϕ ∙ diff для фиксации уклоняющейся части, т. Е. Для реализации v dod = 0, получаются с помощью (38) и (39), те же уравнения, что и в случае изменение диаметра.
Обратите внимание, что положение в осевом направлении части уклонения может быть компенсировано перекатывающимся движением, а направление части уклонения может быть компенсировано смещением ϕ , если часть уклонения отклоняется от соответствующего положения и направления во время движения. 7 = 0.Уклоняющаяся часть определяется ее шириной d блок , которая определяется как длина между осью трубы и отрезком прямой, параллельным оси, и l 7 = l блок , в зависимости от формы завала. Геометрический параметр γ блока вычисляется из,
γblock = arccos (1-dblock2rc). (45)5.4. Изменение диаметра трубы
Целевая форма для изменения диаметра трубы показана на рисунке 7D.4 = π + ϕdiff.
5.5. Движение между внутренним и внешним пространством
Расширяя предложенное движение, мы предлагаем движение, которое соответствует прохождению между внутренней и внешней стороной трубы. Это движение полезно, когда к отверстию трубы трудно подойти напрямую или когда трубу необходимо осмотреть как изнутри, так и снаружи. Целевая форма для этого движения проиллюстрирована на рисунке 7E, а параметры для каждого сегмента показаны в таблице 2. Для начала мы спроектируем направляющую часть за пределами трубы.Здесь сегменты-5–7 составляют направляющую часть головки, которая закреплена радиусом сегмента-5 r io . γ io и l io даются
γio = arcsinrhw2rio, (46) lio = (2rio) 2-hrw2-rc {1-cos (π2-hα)} coshα. (47)Здесь должно быть определено r io , так что l io ≥ 0. Таким образом, предлагаемое движение, доступное для произвольной части уклонения, может быть расширено за пределы трубы за счет проектирования направляющей части для внешней стороны.4 = π + ϕdiff. Для движения снаружи внутрь трубы направляющие хвостовика состоят из сегментов, перечисленных в противоположном порядке в таблице 2.
Таблица 2 . Параметры сегментов, составляющих головную направляющую снаружи трубы.
6. Результаты экспериментов
Проведены эксперименты по проверке эффективности предложенного метода. Системная конфигурация робота-змеи показана на рисунке 8. Мы использовали робота-змею, разработанного Takemori et al.(2018b). Робот-змейка имеет модульную конфигурацию, в которой шарнир и звено покрыты внешней стороной. Эта внешняя часть имеет гребенчатую форму, что обеспечивает гладкую поверхность, не влияя на изгиб сустава. Количество шарниров — 36, длина звена — 70 мм, диаметр звена — 56 мм, вес на звено — 150 г, максимальный крутящий момент шарнира — 4,0 Нм, максимальный угол изгиба шарнира — 90 °. Двигатель приводился в действие регулятором положения с ограничением тока (0.3 A), чтобы обеспечить податливость соединения, а коэффициенты усиления ПИД устанавливаются как (P, I, D) = (800, 0, 100). Робот-змея питается через кабель, и целевой угол для каждого сустава отправляется с компьютера через интерфейс RS485. Камера устанавливается на голове для осмотра трубы и помогает оператору дистанционно управлять роботом. Оператор использует геймпад для выполнения операции.
Наиболее часто используемые трубы имеют внутренний диаметр 194 мм и внешний диаметр 200 мм. Единственная труба, использованная в экспериментах с изменением диаметра трубы, имела внутренний диаметр 290 мм.Параметры, использованные в экспериментах, перечислены в таблице 3. Здесь индекс m означает t или h. м k ось и м k rot для каждой трубы были измерены в предварительных экспериментах, в которых выполнялось только вращательное движение. Для всех последующих случаев мы определили r c = 90 мм.
Таблица 3 . Параметры, используемые в экспериментах.
Мы измерили статический коэффициент между поверхностью робота и внутренней стенкой трубы.Мы поместили один блок робота, состоящий из одного звена и одного шарнира, на трубу и измерили угол наклона трубы, когда блок начал скользить. Устройство начало скользить, когда угол наклона составил около 16 °, а затем измеренный статический коэффициент составил arctan16 ° = 0,27. Это значение является эталонным, поскольку кажется, что его легко изменить в зависимости от состояния контакта.
6.1. Оценка предложенной модели клинка
Во-первых, мы провели эксперименты по проверке модели с учетом скольжения в тех случаях, когда головная и хвостовая части обмотки имеют разные радиусы в зависимости от смещения уклоняющейся части в осевом направлении.Если две трубы имеют разные радиусы, для части обмотки, имеющей больший радиус, физически невозможно войти в меньшую трубу. В этом случае смещение уклоняющейся части к трубе меньшего размера ограниченно изменяется и не может быть правильно прослежено. Поэтому вместо них использовались две трубы одинакового диаметра, 194 мм, и часть хвостовой намотки, только для этого эксперимента, имела больший шаг ( t p w = 600 мм), чем часть головной намотки. ( h p w = 501 мм).4, рассчитанное в Движениях 1–4 [(Движение 1) с учетом смещения только на части хвостовой обмотки (23), (Движение 2) с учетом смещения только на части обмотки головной части (24), (Движение 3) с учетом смещения с скольжение между роботом и трубой при движении без скольжения вокруг оси, а скольжение в осевом направлении ( t v скольжение ≠ 0, ω скольжение = 0), и (движение 4) с учетом смещения со скольжением при движении без скольжения в осевом направлении, но со скольжением вокруг оси ( t v скольжение = 0, ω скольжение ≠ 0)], был проведен на этапе 4 пока хвост робота не достигнет направляющей части головы.Принимая во внимание целевую форму робота, показанную на рис. 7D, когда l dc = 0 мм, хвост робота находится как раз между концами двух труб в конце эксперимента, если уклоняющаяся часть закреплена должным образом. . Поэтому мы измерили положение хвоста робота в конце каждого эксперимента, как показано красной линией на изображении, и сравнили его при четырех условиях. Отметим, что этот эксперимент сфокусирован на фиксации положения уклоняющейся части только в осевом направлении, поскольку трудно наблюдать изменение направления уклоняющейся части в аксиально-симметричной форме мишени.Результаты и данные этих экспериментов показаны на Рисунке 9. Когда смещение уклоняющейся части учитывалось либо на задней части обмотки, либо на головной части (движение 1 и движение 2), ошибка составляла 458 или 222 мм, соответственно. . С другой стороны, предложенная модель ( t v скольжение ≠ 0, ω скольжение = 0) (движение 3) дала меньшую ошибку, 97 мм. Кроме того, предложенная модель, учитывающая скольжение ( t v скольжение = 0, ω скольжение ≠ 0) (движение 4) дала наименьшую ошибку, 5 мм.Эти результаты показали, что Движение 1 и Движение 2 вызывают большие ошибки, потому что они игнорируют эффект скольжения. Движение 3 уменьшило ошибку по сравнению с первыми двумя движениями за счет исправления уклоняющейся части с учетом скольжения. Однако небольшая ошибка осталась из-за ошибки моделирования, вызванной моделью вязкого трения или состоянием контакта в осевом направлении, поскольку Движение 3 зависит от скольжения в осевом направлении. Напротив, Motion 4 успешно реализовал фиксацию уклоняющейся части в осевом направлении, как и ожидалось, потому что не требовало скольжения в осевом направлении и не было затронуто ошибкой моделирования скольжения в осевом направлении.Следовательно, предлагаемые движения, основанные на модели скольжения, как в случаях ( t v скольжение ≠ 0, ω скольжение = 0), так и ( t v скольжение = 0 , ω скольжение ≠ 0) считаются эффективными для фиксации уклоняющейся части. Уменьшение ошибки моделирования скольжения остается нашей задачей на будущее.
Рисунок 9 . Экспериментальные результаты и данные предварительных экспериментов. (A, B) Движение 1: фиксация уклоняющейся части только на задней части, (C, D) Движение 2: фиксация уклоняющейся части только на головной части, (E, F) Движение 3: использование предложенной модели скольжения ( t v скольжение ≠ 0, ω скольжение = 0) и (G, H) Движение 4: использование предложенной модели скольжения ( t v скольжение = 0, ω скольжение ≠ 0).
6.2. Эксперименты для различных трубных конструкций
Затем мы провели четыре эксперимента, в которых робот преодолел стык, сдвиг, блокировку и скачкообразное изменение диаметра. Как упоминалось в разделе 5, целевая форма для изгиба аналогична форме для соединения, а целевая форма для непрерывного изменения диаметра трубы аналогична целевой форме для прерывистого изменения диаметра трубы. Таким образом, эти четыре эксперимента могут продемонстрировать эффективность предложенного метода для всех трубных конструкций на Рисунке 1A.Также мы провели эксперимент, в котором движение происходит изнутри наружу трубы. Оператор посмотрел прямо на робота-змею и выполнил операцию в соответствии с процедурой, описанной в первой части раздела 4.2.
Как показано на рисунках 10A – D, робот-змея успешно преодолел стык, сдвиг, закупорку и изменение диаметра трубы. Робот-змея также мог перемещаться изнутри трубы наружу, как показано на Рисунке 10F. Пожалуйста, также смотрите Дополнительное видео 1 для получения подробной информации.На рисунке 11 показаны значения ψ 0 , s h и ϕ смещения для каждого эксперимента. Для экспериментов, связанных с соединением, сдвигом и блокировкой, робот мог перемещаться по трубе под управлением сдвига и качением, как описано в разделе 4.2, только с первой настройкой оператором положения и направления уклоняющейся части. в Шаге 3.
Рисунок 10 . Экспериментальные результаты (A) , проходящего стык ( r изгиб = 100 мм и rbend = 90 ∙), (B) проходной сдвиг ( d сдвиг = 100 мм), (C ) преодоление засора (правая половина трубы перекрыта по ширине на 10 мм, а d колодка = 48.5 мм, л блок = 30 мм), (D) согласование изменения диаметра (внутренний диаметр трубы изменяется с 290 на 194 мм, и л dc = 0 мм) с использованием предложенного клинья модель ( t v скольжение ≠ 0, ω скольжение = 0), (E) перемещение изнутри наружу трубы с использованием предложенной модели скольжения ( t V скольжение ≠ 0, ω скольжение = 0, r io = 90 мм, ψ ∙ 0, предел = 0.03 рад / с) и (F) движение изнутри наружу трубы с использованием предложенной модели скольжения ( t V скольжение ≠ 0, ω скольжение = 0, r io = 90 мм).
Рисунок 11 . Экспериментальные данные о (A) преодолении стыка, (B) преодолении сдвига, (C) преодолении блокировки, (D) преодолении изменения диаметра с использованием предложенной модели скольжения ( t v скольжение ≠ 0, ω скольжение = 0), (E) перемещение изнутри наружу трубы с использованием предложенной модели скольжения ( t v скольжение ≠ 0, ω скольжение = 0) и (F) перемещение изнутри наружу трубы с использованием предложенной модели скольжения ( t V скольжение = 0, ω скольжение ≠ 0).
Поскольку соединение является самым серьезным препятствием, которое не допускает ни малейшего отклонения положения и направления уклоняющейся части, эксперимент по проверке угловой погрешности соединения между желаемым углом и фактическим углом был также проведен для преодоления соединения. . Из-за ограничения скорости передачи данных временной шаг этого эксперимента (Δ t = 0,2 с) в 10 раз больше, чем у других экспериментов для получения угла сочленения. Как показано на Фигуре 12B, фактический угол соединения θ i ( t ) (зеленая линия) отставал от желаемого угла θid (t) (черная линия).Считается, что эта устойчивая задержка вызвана задержкой связи для передачи желаемого угла к каждому суставу и получения фактического угла от каждого сустава и временной задержки, необходимой для изменения угла каждого сустава с фактического угла на желаемый угол из-за ограничение скорости мотора. Длительность временной задержки составляла около пяти шагов для каждого сустава, кроме первого сустава, который ответил на один временной шаг раньше, чем другие. Фактический угол, смещенный вперед на пять ступеней θ i ( t + 5Δ t ) (красная линия), хорошо соответствует желаемому углу для второго сустава, как показано в нижней части рисунка 12A, хотя ошибка примерно один временной шаг оставлен только для первого стыка.Угловая погрешность между желаемым и фактическим углом для каждого соединения (θi (t) -θid (t)) изображена в верхней части рисунка 12B. Чтобы устранить влияние временной задержки, угловая ошибка между желаемым и смещенным фактическим углом для пяти временных шагов для каждого сустава (θi (t) -θid (t + 5Δt)) изображена в нижней части рисунка 12B. Как показано в нижней части Фигуры 12В, сравнительно большая угловая погрешность сустава с течением времени смещалась от головы к хвосту. Это указывает на то, что угловая ошибка наблюдалась около части уклонения, как обведено пунктирными линиями на фиг. 12B, и часть уклонения отклоняется от соответствующего положения и направления до некоторой степени.Кроме того, погрешность последнего стыка, 36-го стыка, довольно велика и составляет т = 62 с. Это связано с тем, что хвостовое звено длиннее других звеньев и было захвачено трубой при прохождении через соединение. Считается, что погрешность положения и направления уклоняющейся части компенсируется двумя факторами, вызванными геометрическими ограничениями робота: податливой адаптацией к окружающей среде в суставе благодаря управлению положением двигателя с ограничением крутящего момента, и проскальзывание между роботом и трубой.
Рисунок 12 . Экспериментальные данные угла стыка для преодоления стыка. (A) Задержка по времени угла соединения для первого шарнира (вверху) и второго шарнира (внизу). (B) Угловая погрешность соединения между желаемым углом и фактическим углом соединения (вверху). и ошибка смещения угла соединения между желаемым углом и фактическим углом, сдвинутая вперед на 5 временных шагов (внизу). Угловая погрешность и ошибка сдвига угла 1–12-го, 13–24-го и 25–36-го стыков показаны на левой, центральной и правой панели рисунков соответственно.
Кроме того, робот смог согласовать изменение диаметра с предложенной моделью с учетом проскальзывания между роботом и трубой, даже когда радиусы головной и хвостовой частей намотки различались. На рисунке 10D показан только результат предложенной модели ( t v скольжение ≠ 0, ω скольжение = 0), но модель ( t v скольжение = 0, ω скольжение ≠ 0) также успешно отработал; см. Дополнительное видео 1.Напротив, робот не смог перемещаться изнутри наружу трубы с использованием предложенной модели скольжения ( t v скольжение ≠ 0, ω скольжение = 0), как на рисунке 10E, и ему удалось сделайте это только с предложенной моделью скольжения ( t v скольжение = 0, ω скольжение ≠ 0) Рисунок 10F. Как показано на средней панели рисунка 10E, робот не мог поддерживать ту часть себя, которая находилась под трубой, из-за ограничения крутящего момента двигателя, а часть обмотки головки не соприкасалась с трубой и не воспринимала силу трения, вопреки тому, что мы ожидали.Следовательно, уклоняющаяся часть переместила правую сторону изображения, хотя теоретически ожидалось, что она переместится в левую часть изображения после того, как ψ ∙ 0 достигнет -ψ ∙ 0, предела. Этот эффект привел к тому, что робот выпал из трубы. С другой стороны, поскольку эксперимент, показанный на рисунке 10F, проводился с использованием предложенной модели скольжения ( t v скольжение = 0, ω скольжение ≠ 0), уклоняющаяся часть не отклонялась от правильное положение в осевом направлении, даже если робот не всегда мог прижать корпус к трубе.Вместо этого было обнаружено, что вращение робота вокруг оси вызвано проскальзыванием вокруг оси. Кроме того, из-за ограничения крутящего момента двигателя робот, вероятно, не сможет поддерживать часть обмотки головки для обоих рисунков 10E, F исправленного документа в зависимости от начальной ориентации робота и защитной функции двигателя. что сделало выходной крутящий момент двигателя равным нулю, когда двигатель обнаруживает постоянную нагрузку, превышающую максимальную мощность.
7. Заключение
Был предложен единый подход к проектированию движения, которое позволяет роботу-змею преодолевать сложные конструкции из труб.Предлагаемый метод позволяет роботу преодолевать различные препятствия, спроектировав уклоняющуюся часть, которая является частью формы цели, специально для препятствия. Для этого оба конца уклоняющейся части располагаются на осях труб с направляющими частями. Кроме того, мы разработали метод фиксации уклоняющейся части на препятствии во время преодоления препятствия, который включал соответствующую комбинацию перекатывающего движения и управления переключением передач. Кроме того, мы построили модель, учитывающую проскальзывание между роботом и трубой, и расширили предложенный метод, чтобы сделать его применимым к движениям, требующим двух спиралей с разными радиусами, т.е.е., движение для изменения диаметра и движение между внутренней и внешней частью трубы. Мы провели эксперименты, чтобы проверить эффективность этих методов, и продемонстрировали, что робот-змея успешно преодолевает не только стык, который уже был реализован, но также сдвиг, засорение и прерывистое изменение диаметра трубы, которые ранее были невозможны. Мы также реализовали движение трубы изнутри наружу в эксперимент.
В одном из будущих исследований мы рассмотрим способ более простого выполнения удаленных операций.В настоящее время оператор должен соответствующим образом отрегулировать относительное положение уклоняющейся части относительно окружающей среды. Кроме того, теперь эксперименты проводятся в идеальной ситуации, когда оператор может определить состояние робота, глядя на него прямо через прозрачную трубу. Мы также оставляем на будущее задачу реализации автономного движения путем обнаружения конструкции трубы с помощью датчиков без значений параметров. Наконец, еще одна задача на будущее — кинематический / динамический анализ движения, чтобы сохранить соответствующий контакт с трубой.
Заявление о доступности данныхОригинальные материалы, представленные в исследовании, включены в статью / дополнительные материалы, дальнейшие запросы можно направлять соответствующим авторам.
Взносы авторов
MI: написание статьи, разработка теории и проведение экспериментов. TT: разработка теории, проведение экспериментов, предоставление отзывов о теоретических и экспериментальных результатах и предоставление отзывов по проектам отчета. МП и ФМ: разработка теории, предоставление отзывов на теоретические и экспериментальные результаты и предоставление отзывов на проекты отчета.Все авторы внесли свой вклад в статью и одобрили представленную версию.
Финансирование
Эта работа была частично поддержана программой ImPACT Совета по науке, технологиям и инновациям (Кабинет министров, правительство Японии).
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Содержание этой рукописи было частично представлено на Международной конференции IEEE по робототехнике и автоматизации (Inazawa et al., 2020).
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/frobt.2021.629368/full#supplementary-material
Дополнительное видео 1. Согласование труб.
Список литературы
Андерссон, С. Б. (2008). Дискретность непрерывной кривой. IEEE Trans. Робот . 24, 456–461. DOI: 10.1109 / TRO.2008.
CrossRef Полный текст | Google Scholar
Ариидзуми, Р., и Мацуно, Ф. (2017). Динамический анализ походки трех змеиных роботов. IEEE Trans. Робот . 33, 1075–1087. DOI: 10.1109 / TRO.2017.2704581
CrossRef Полный текст | Google Scholar
Ариидзуми Р., Такахаши Р., Танака М. и Асаи Т. (2018). Контроль траектории движения головы робота-змеи и его устойчивость при отказе исполнительного механизма. IEEE Trans. Control Syst. Технол . 27, 2589–2597. DOI: 10.1109 / TCST.2018.2866964
CrossRef Полный текст | Google Scholar
Баба Т., Камеяма Ю., Камегава Т. и Гофуку А. (2010). «Робот-змея движется внутри трубы со спиралевидным качением», в материалах Proceedings of the SICE Annual Conference (Тайбэй), 2319–2325. DOI: 10.1109 / SSRR.2011.6106789
CrossRef Полный текст | Google Scholar
Креспи, А., Иджспирт, А. Дж. (2008). Онлайн-оптимизация плавания и ползания в роботе-амфибии-змее. IEEE Trans. Робот . 24, 75–87. DOI: 10.1109 / TRO.2008.
6
CrossRef Полный текст | Google Scholar
Хаттон, Р.Л. и Чозет Х. (2010). Генерация походок для роботов-змей: отожженная цепочка и извлечение волны ключевых кадров. Auton. Роботы 28, 271–281. DOI: 10.1007 / s10514-009-9175-2
CrossRef Полный текст | Google Scholar
Хикс, Г., Ито, К. (2005). Метод определения оптимальной походки с применением змееподобной структуры последовательной связи. IEEE Trans. Автомат. Контроль 50, 1291–1306. DOI: 10.1109 / TAC.2005.854583
CrossRef Полный текст | Google Scholar
Хиросе, С.(1987). Биологические роботы (змееподобный локомотор и манипулятор) . Лондон: Издательство Оксфордского университета.
Google Scholar
Инадзава, М., Такемори, Т., Танака, М., и Мацуно, Ф. (2020). «Расчет движения для робота-змеи, который преодолевает сложные конструкции труб постоянного диаметра», в материалах Proceedings of the IEEE International Conference on Robotics and Automation (Paris), 8073–8079. DOI: 10.1109 / ICRA40945.2020.
24
CrossRef Полный текст | Google Scholar
Камегава, Т., Баба, Т., и Гофуку, А. (2011). «Управление V-образным смещением для робота-змеи, перемещающего внутреннюю часть трубы с помощью спирального качения», в материалах Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (Kyoto), 1–6.
Google Scholar
Камегава Т., Харада Т. и Гофуку А. (2009). «Реализация подъема по цилиндру со спиральной формой роботом-змеей с пассивными колесами», в материалах Труды Международной конференции по робототехнике и автоматизации IEEE (Кобе), 3067–3072.DOI: 10.1109 / ROBOT.2009.5152862
CrossRef Полный текст | Google Scholar
Кано Т., Ёсизава Р. и Исигуро А. (2018). «Змеиоподобный робот, который может генерировать универсальные модели походки с помощью управления на основе тегота», в материалах Proceedings of the International Conference on Biomimetic and Biohybrid Systems (Paris), 249–254. DOI: 10.1007 / 978-3-319--6_26
CrossRef Полный текст | Google Scholar
Liljebäck, P., Pettersen, K. Y., Stavdahl, Ø., и Гравдаль, Дж. Т. (2010). Анализ управляемости и устойчивости движения плоского робота-змейки. IEEE Trans. Автомат. Контроль 56, 1365–1380. DOI: 10.1109 / TAC.2010.2088830
CrossRef Полный текст | Google Scholar
Лильебек, П., Петтерсен, К. Ю., Ставдал, О., и Гравдаль, Дж. Т. (2014). «Структура трехмерного планирования движения для роботов-змей», в Proceedings of the IEEE / RSJ International Conference on Intelligent Robots and Systems (Chicago, IL), 1100–1107.DOI: 10.1109 / IROS.2014.6
CrossRef Полный текст | Google Scholar
Мацуно Ф. и Сато Х. (2005). «Управление отслеживанием траектории роботов-змей на основе динамической модели», в материалах Proceedings of the IEEE International Conference on Robotics and Automation (Barcelona), 3029–3034. DOI: 10.1109 / ROBOT.2005.1570575
CrossRef Полный текст | Google Scholar
Мохаммади А., Резапур Э., Маджоре М. и Петтерсен К. Ю. (2015). Управление маневрированием плоских роботов-змей с использованием виртуальных голономных ограничений. IEEE Trans. Control Syst. Технол . 24, 884–899. DOI: 10.1109 / TCST.2015.2467208
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Накадзима М., Танака М. и Танака К. (2019). Одновременный контроль двух точек для робота-змеи и его применение для транспортировки. Робот IEEE. Автомат. Lett . 5, 111–118. DOI: 10.1109 / LRA.2019.2
3
CrossRef Полный текст | Google Scholar
Ци В., Камегава Т. и Гофуку А.(2018). Движение спирального распространения волны для робота-змеи на вертикальной трубе, содержащей ответвление. Artif. Спасательный робот . 23, 515–522. DOI: 10.1007 / s10015-018-0479-1
CrossRef Полный текст | Google Scholar
Роллинсон Д. и Чозет Х. (2016). Передвижение по трубопроводной сети с роботом-змеей. Дж. Полевой робот . 33, 322–336. DOI: 10.1002 / rob.21549
CrossRef Полный текст | Google Scholar
Сайто М., Фукая М. и Ивасаки Т. (2002).Змеиное движение с роботизированными змеями. IEEE Control Syst. Mag . 22, 64–81. DOI: 10.1109 / 37.980248
CrossRef Полный текст | Google Scholar
Сарторетти, Г., Пайвин, В., Ши, Ю., Ву, Ю., и Чозет, Х. (2019). Распределенное обучение децентрализованным политикам управления мобильными роботами. IEEE Trans. Робот . 35, 1109–1122. DOI: 10.1109 / TRO.2019.2
CrossRef Полный текст | Google Scholar
Такемори Т., Танака М., и Мацуно, Ф. (2018a). Дизайн походки робота-змеи путем соединения сегментов кривой и экспериментальной демонстрации. IEEE Trans. Робот . 34, 1384–1391. DOI: 10.1109 / TRO.2018.2830346
CrossRef Полный текст | Google Scholar
Такемори Т., Танака М. и Мацуно Ф. (2018b). «Восхождение по лестнице с роботом-змеей», в Proceedings of the IEEE / RSJ International Conference on Intelligent Robots and Systems (Madrid), 1–9. DOI: 10.1109 / IROS.2018.85
CrossRef Полный текст | Google Scholar
Танака, М., Кон, К., Танака, К. (2015). Полуавтономное предотвращение столкновений всего тела робота-змеи на основе датчика дальности. IEEE Trans. Control Syst. Технол . 23, 1927–1934. DOI: 10.1109 / TCST.2014.2382578
CrossRef Полный текст | Google Scholar
Tesch, M., Lipkin, K., Brown, I., Hatton, R., Peck, A., Rembisz, J., et al. (2009). Параметризованные и запрограммированные походки для модульных роботов-змей. Adv. Робот . 23, 1131–1158. DOI: 10.1163 / 156855309X452566
CrossRef Полный текст | Google Scholar
Wu, X., и Ма, С. (2013). Рулевое управление с нейронным управлением для предотвращения столкновений робота-змеи. IEEE Trans. Control Syst. Технол . 21, 2443–2449. DOI: 10.1109 / TCST.2012.2237519
CrossRef Полный текст | Google Scholar
Ямада, Х., Хиросе, С. (2006). «Исследование трехмерной формы механизма активного шнура», в материалах Proceedings of the IEEE International Conference on Robotics and Automation (Orlando, FL), 2890–2895. DOI: 10.1109 / ROBOT.2006.1642140
CrossRef Полный текст | Google Scholar
Ямада, Х., и Хиросе, С. (2008). Исследование механизма активного шнура — приближения к непрерывным кривым многосуставного тела. Дж. Робот. Soc. Япония . 26, 110–120. DOI: 10.7210 / jrsj.26.110
CrossRef Полный текст | Google Scholar
Якуб С., Али А., Усман М., Зухаиб К. М., Хан А. М., Ан, Б. и др. (2019). Дизайн походки по спиральной кривой для модульного робота-змеи, движущегося по трубе. Внутр. J. Control Autom. Syst . 17, 2565–2573. DOI: 10.1007 / s12555-019-0074-9
CrossRef Полный текст | Google Scholar
Чжэнь, В., Гонг, К., и Чозет, Х. (2015). «Моделирование катящейся походки робота-змеи», в материалах Proceedings of the IEEE International Conference on Robotics and Automation (Вашингтон, округ Колумбия), 3741–3746.
Google Scholar
Чжоу, Ю., Чжан, Ю., Ни, Ф., и Лю, Х. (2017). «Походка робота-змеи, похожая на пружину, поднимающаяся по трубе», в материалах Труды Международной конференции IEEE по робототехнике и биомиметике (Макао), 1886–1891. DOI: 10.1109 / ROBIO.2017.8324694
CrossRef Полный текст | Google Scholar
Certified Unified Program Agency (CUPA) — Город Окснард
ЧТО ТАКОЕ CUPA?
Формы и раздаточные материалы CUPA | Часто задаваемые вопросы | Постановление города
До 1993 года калифорнийские предприятия, работающие с опасными материалами, регулировались несколькими различными государственными и местными агентствами, каждое из которых имело свои собственные процедуры получения разрешений, инспекций и сборов.Законопроект Сената 1082, принятый в 1993 году, создал Единую нормативную программу по обращению с опасными отходами и опасными материалами (Единая программа), которая объединила шесть программ по опасным материалам и отходам (элементы программы) в рамках одного местного агентства, Сертифицированного Агентства единой программы (CUPA). Программные элементы, объединенные в Единую программу, следующие:
- Программа инвентаризации опасных материалов и бизнес-плана
- Генератор опасных отходов
- Программы обращения с опасными отходами на месте (многоуровневые разрешения)
- Подземный резервуар для хранения (UST) Программа
- Программа по предотвращению разливов надземных резервуаров и планам противодействия (SPCC)
- Программа предотвращения аварийных утечек, Калифорния (CalARP)
В рамках Единой программы ежегодные сборы за каждый элемент программы объединяются в единую систему сборов, выдается единое комбинированное разрешение на работу, инспекции объединяются, где это возможно, а процедуры обеспечения соблюдения становятся более последовательными.Целью Единой программы является обеспечение безопасности опасных материалов в рамках согласованной, эффективной и действенной программы. В рамках этой программы государство установило плату за услуги (надбавки) для финансирования их надзорной деятельности; местное агентство взимает дополнительную плату для штата, но не удерживает ее часть.
ЭЛЕМЕНТЫ ПРОГРАММЫ CUPA
Бизнес-план по опасным материалам [Кодекс здоровья и безопасности (H&SC), глава 6.95] Бизнес-план означает отдельный план для каждого предприятия, участка или филиала компании.
Компания обязана разработать и представить бизнес-план, если предприятие обрабатывает опасные материалы в количестве, равном или превышающем 55 галлонов, 500 фунтов или 200 кубических футов в любое время в течение года. Примерами обычных материалов, которые считаются опасными, являются все типы топлива (включая пропан), масла (включая как новое, так и отработанное масло), краски, чернила, растворители, сжатые газы и те материалы, для которых производитель составил Паспорт безопасности ( SDS) или имеют рейтинг NFPA / HMIS 1 или выше для здоровья, воспламеняемости, реактивности или имеют особую опасность.
Компании должны уведомлять Oxnard Fire CUPA в течение (30) дней о любых существенных изменениях в их бизнес-плане. Это будет включать 100-процентное изменение количества любого обрабатываемого опасного материала, любого нового опасного материала, обработанного сверх пороговых значений, существенное изменение в деятельности или изменение юридического адреса, владельца или имени. Уведомление можно удовлетворить, отправив изменения через Калифорнийскую систему экологической отчетности (CERS) по адресу https: // cers.calepa.ca.gov.
БИЗНЕС-ПЛАН ТРЕБОВАНИЯ К ГОДОВОЙ ОТЧЕТНОСТИ
Компания, которая обрабатывает опасные материалы в количестве, равном или превышающем пороговое значение, должна соответствовать установленным государством требованиям к ежегодной электронной отчетности. Ежегодные заявки удовлетворяются путем внесения изменений через Калифорнийскую систему экологической отчетности (CERS) https://cers.calepa.ca.gov. Подача документов и повторная сертификация HMBP будут приниматься в течение года при условии, что они будут представлены в течение 12 месяцев с даты последней подачи или повторной сертификации.
Требования к годовой отчетности бизнес-плана:
Если в бизнес-план нет изменений:
Компания может выполнить требования к ежегодной государственной отчетности, отправив элементы «Информация об объекте», «Инвентаризация опасных материалов», «План действий в чрезвычайных ситуациях и обучения» через CERS в соответствии с первоначальной или предыдущей подачей.
Если есть изменения в бизнес-плане:
Компания должна отправлять все изменения через CERS, чтобы включать любые обновления в Информацию об объекте, Инвентаризацию опасных материалов, карты участков объекта и План действий в чрезвычайных ситуациях / на случай непредвиденных обстоятельств.
ССЫЛКИ
.
Об авторе